

Unmanned aerial vehicle route planning method based on improved Salp algorithm
A track planning, UAV technology, applied in three-dimensional position/channel control, instrument, non-electric variable control and other directions, can solve problems such as incompatibility, falling into local optimum, etc., to achieve flexible calculation process and slow convergence speed Effect
Active Publication Date: 2018-11-30
SHANDONG UNIV OF SCI & TECH
View PDF10 Cites 31 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the basic salp swarm algorithm also has the disadvantage of falling into local optimum, which is not suitable for application in the field of UAV trajectory planning.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
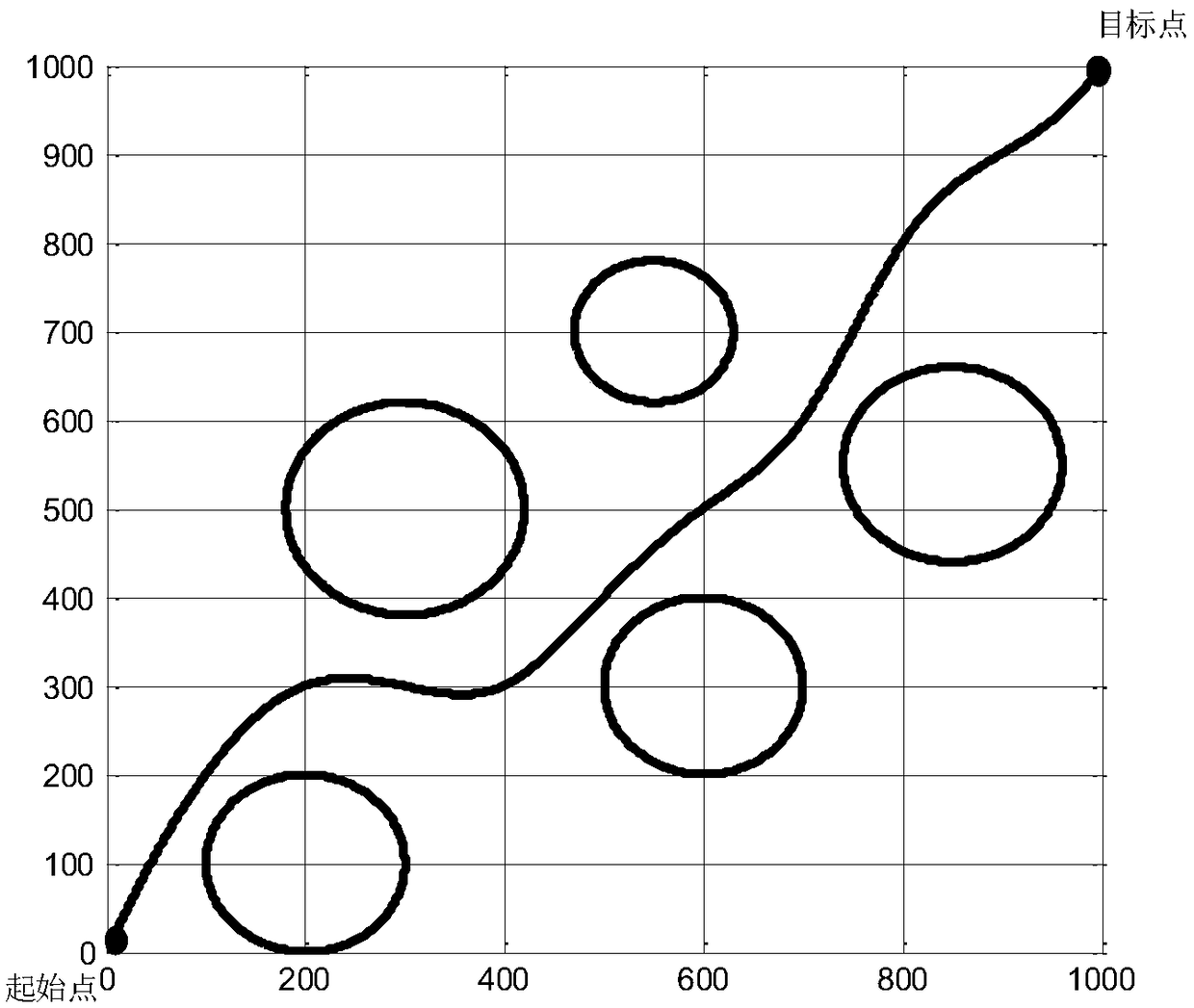
[0104] Carry out a simulation experiment, select a simulation space of 1000*1000; set 5 threats, the coordinates are (200,100), (300,500), (300,300), (550,700), (850,550), and the threat radius is 100,120,100,80,110 ;The coordinates of the starting point are (0,0), and the coordinates of the ending point are (1000,1000); the initial salp population is 300, the maximum number of iterations is 100, the adjustable control factor n is set to 1, and h is set to 1 , ε 1 set to 5, ε 2 Set to 40. Obtained by Matlab such as image 3 The track shown and the Figure 4 As shown in the convergence curve of the optimization process, the time for planning to obtain the optimal track is 3.7596241s.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
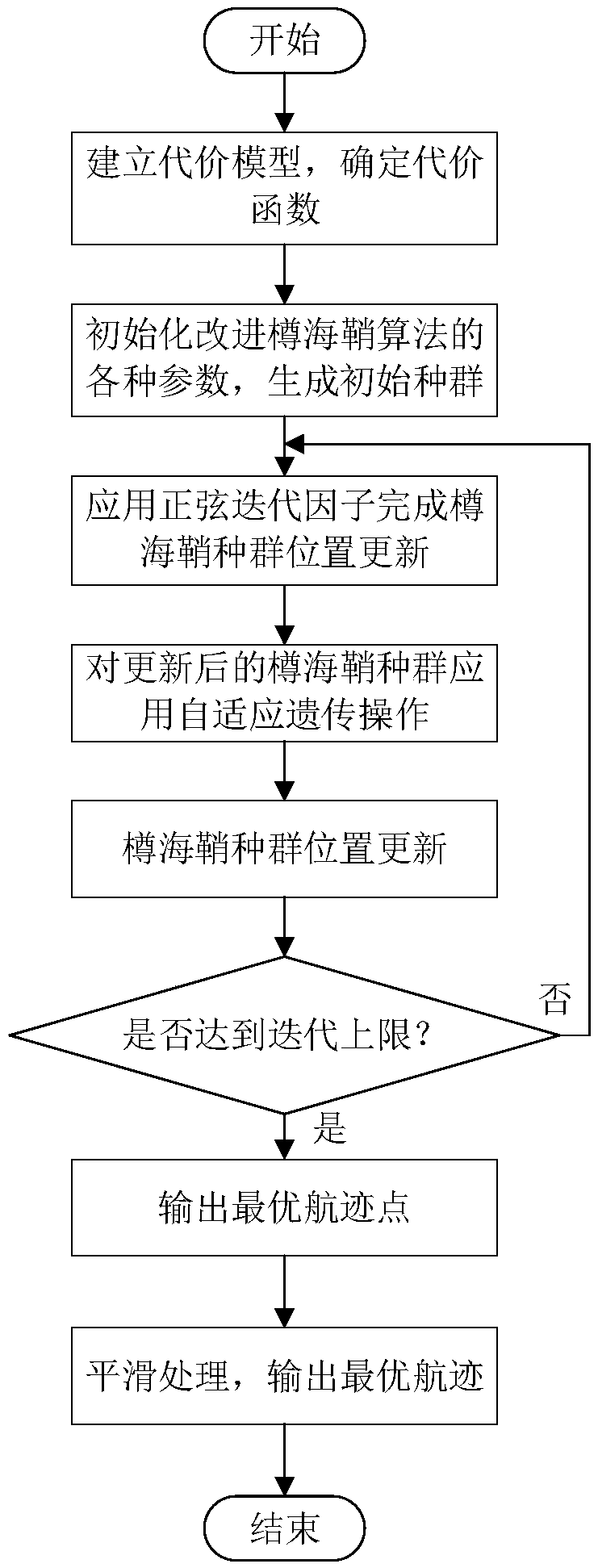
The invention provides an unmanned aerial vehicle route planning method based on an improved Salp algorithm, belonging to the technical field of unmanned aerial vehicle route planning. The method comprises the following steps: firstly, determining a start point position, a destination point position and a threatening area range; establishing a route planning cost model through path cost and threatening cost; performing optimizing for the established cost model, on the basis of a basic Salp algorithm, updating the position of a population with a sinusoidally varying iterative factor, embeddingan adaptive genetic operator to improve optimizing capability of the algorithm; after upper limit of iteration is reached, obtaining an optimal individual position, namely unmanned aerial vehicle optimal route points from the start point to the destination point; smoothening a connection line of the obtained optimal route points, obtaining the optimal route, and realizing route planning. The method provided by the invention can plan the optimal route from the start point to the destination point and avoid that the route is in the threatening area, the method has flexible, simple and fast calculation processes, and the method solves a problem that the existing route planning optimization algorithm has relatively low convergence speed and is very liable to be caught in local optimum.
Description
technical field [0001] The invention belongs to the field of UAV track planning, and in particular relates to a UAV track planning method based on an improved salp algorithm. Background technique [0002] With the maturity of drone-related technologies and people's increasing interest, drones are increasingly used in military, work, and life. UAV trajectory planning is to find the optimal flight trajectory of the UAV from the starting point to the target point in a given flight space, while avoiding threats in the flight area and completing the flight mission requirements. [0003] There are many planning methods in the field of UAV trajectory planning, and stochastic search optimization algorithm is one of the important methods. At present, the stochastic search optimization algorithms commonly used in trajectory planning include: particle swarm algorithm, pigeon swarm algorithm, ant colony algorithm, etc. These algorithms simulate the behavioral characteristics of biolog...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05B13/04G05D1/10
CPCG05B13/042G05D1/101
Inventor盖文东曲承志钟麦英孙成贤张婧
OwnerSHANDONG UNIV OF SCI & TECH