

Navigation system of deep sea submersible vehicle and data fusion method for state switching of deep sea submersible vehicle
A navigation system and state switching technology, applied in the field of navigation, can solve the problems of accumulation, random error, loss of lock, etc., and achieve the effect of improving work accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
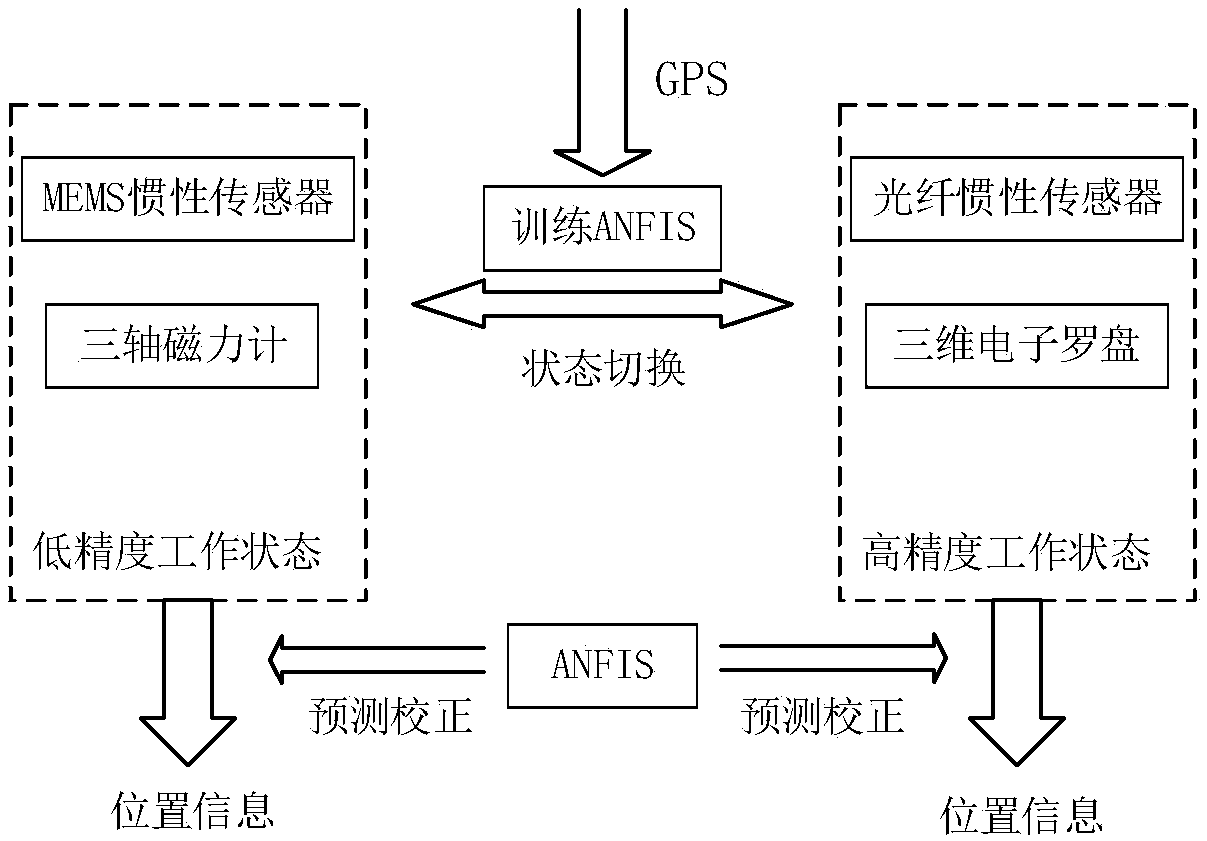
[0028] Such as figure 1 As shown, a deep-sea submersible navigation system includes a micro-electromechanical system inertial measurement unit (MEMS-IMU), an optical fiber inertial sensor, a global satellite positioning system (GPS) receiving module, a three-dimensional electronic compass, a three-axis magnetometer, a depth gauge, a digital Signal processing (DSP) block. The MEMS-IMU uses an inertial sensor and integrates a three-axis accelerometer and a three-axis gyroscope to collect motion data. The fiber optic inertial sensor is based on the fiber optic gyroscope and is also used to collect motion data. The GPS receiving module is used to receive GPS signals and transmit them to the DSP module for calculation. The three-axis magnetometer and the three-dimensional electronic compass adopt a redundant design to assist the IMU in correctin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More