

A Vision-Based Terrain Classification Method for Mobile Robots
A mobile robot and terrain classification technology, applied in the field of robotics, can solve the problems of weak computing power of robots, lower classification accuracy, and occupation of computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
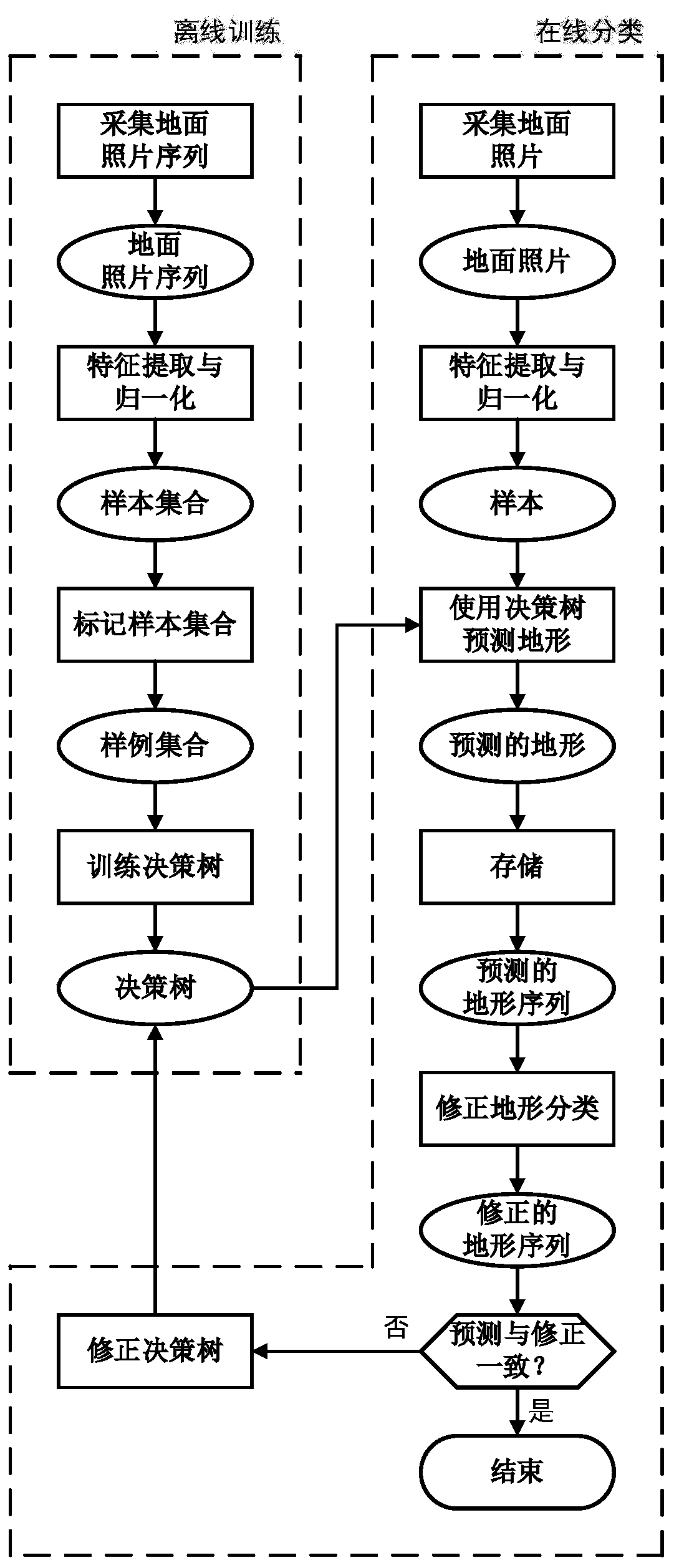
[0060] Such as figure 1 As shown, the present invention includes two parts of offline training and online classification, and the specific implementation steps are as follows:
[0061] The offline training part includes the following steps:
[0062] The first step is to control the robot to move at a constant speed on different terrains, during which the camera installed on the robot is used to capture ground images to obtain a sequence of ground images;
[0063] In the second step, after feature extraction and normalization of each image in the ground image sequence obtained in the first step, the sample set Σ is obtained, and each sample S in the sample set t Described by 12 features, each sample is a vector in the i-dimensional sample sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More