

Measurement delay filtering method for small field star sensor
A star sensor, delay filtering technology, applied in astronomical navigation and other directions, can solve problems such as cumbersome, affecting the real-time output of attitude information and time delay.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
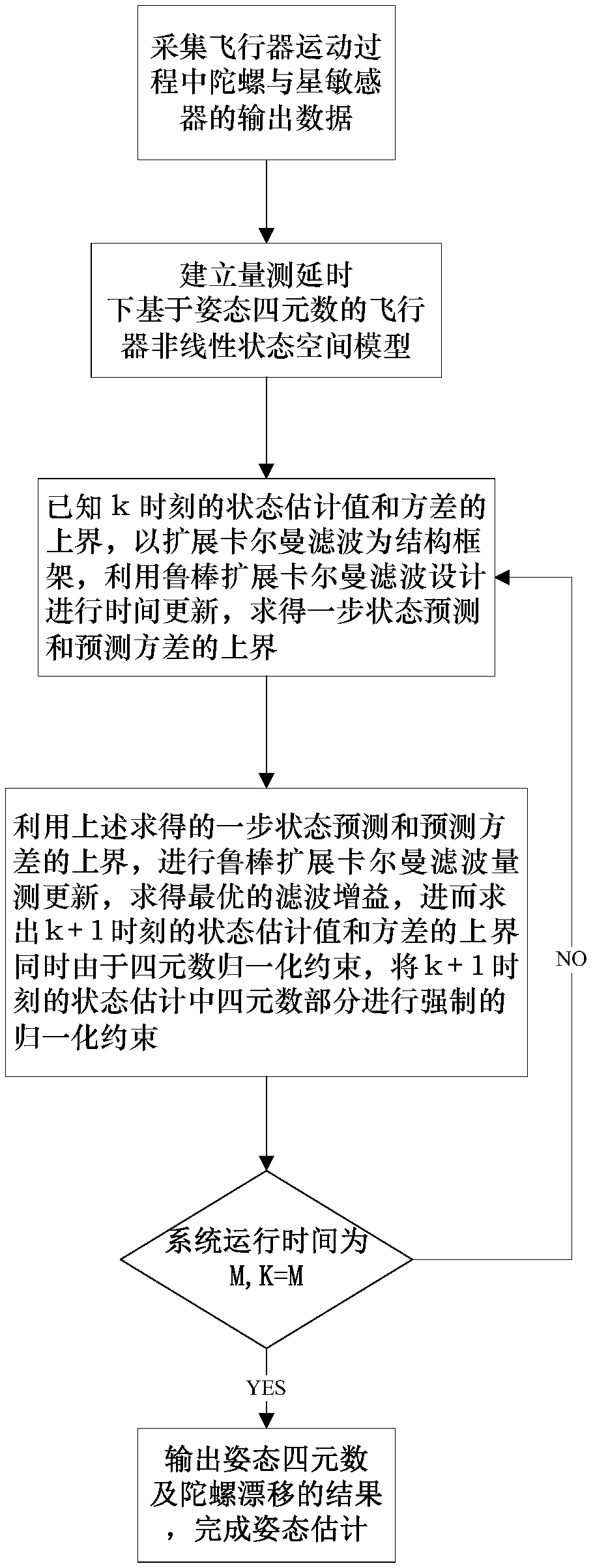
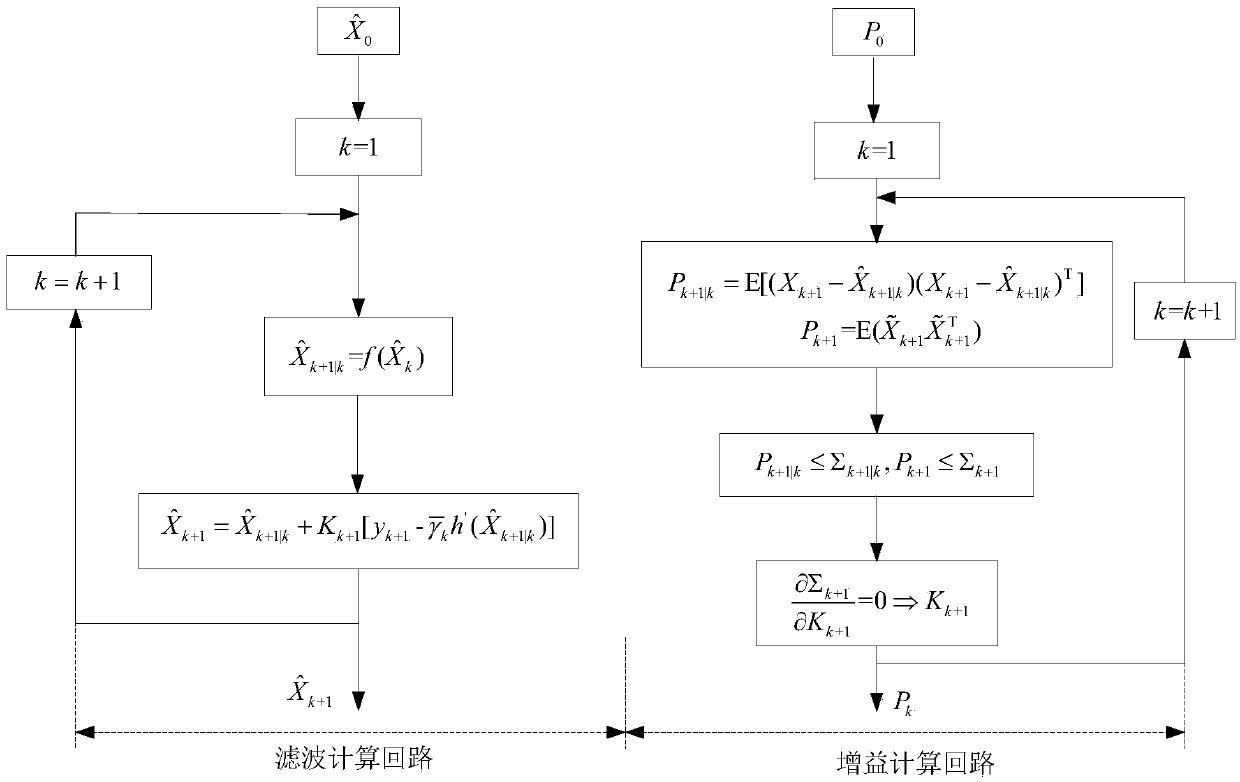
Method used
Image

Examples
Embodiment 1
[0180] The initial state value is x 0 =[0 0 0 1 0.1 0.1 0.1] T , the corresponding initial quaternion part is q 0 =[0 00 1] T , the initial gyro drift part is β 0 =[0.1 0.1 0.1] T deg / h, the three reference vectors of the star sensor are set to r 1 =[1 0 0] Τ , r 2 =[0 1 0] Τ , r 3 =[0 0 1] Τ . The sampling frequency of star sensor and gyro is 1Hz. The initial three attitude angle error variance matrices are expressed as (0.1deg) 2 Ι 3×3 , the error variance matrix of gyro drift is expressed as (0.2deg / h) 2 Ι 3×3 . The actual star sensor has high precision, we can ignore the high-order terms obtained by Taylor expansion, B k ,D k+1 Set to 0. adjustment matrix In order to ensure the accuracy that the system can achieve, the parameters λ and μ are both set to 0.0001, and the parameter ε is set to 0.1. It can be seen from the state model and measurement model given in Chapter 2, which includes additive noise, and we consider the impact of noise and delay on t...
Embodiment 2
[0182] Assuming that there is a delay phenomenon when the star sensor is working, the vector delay rates in the three directions are different and satisfy the Bernoulli distribution, as follows:
[0183]
[0184] Simulation results:
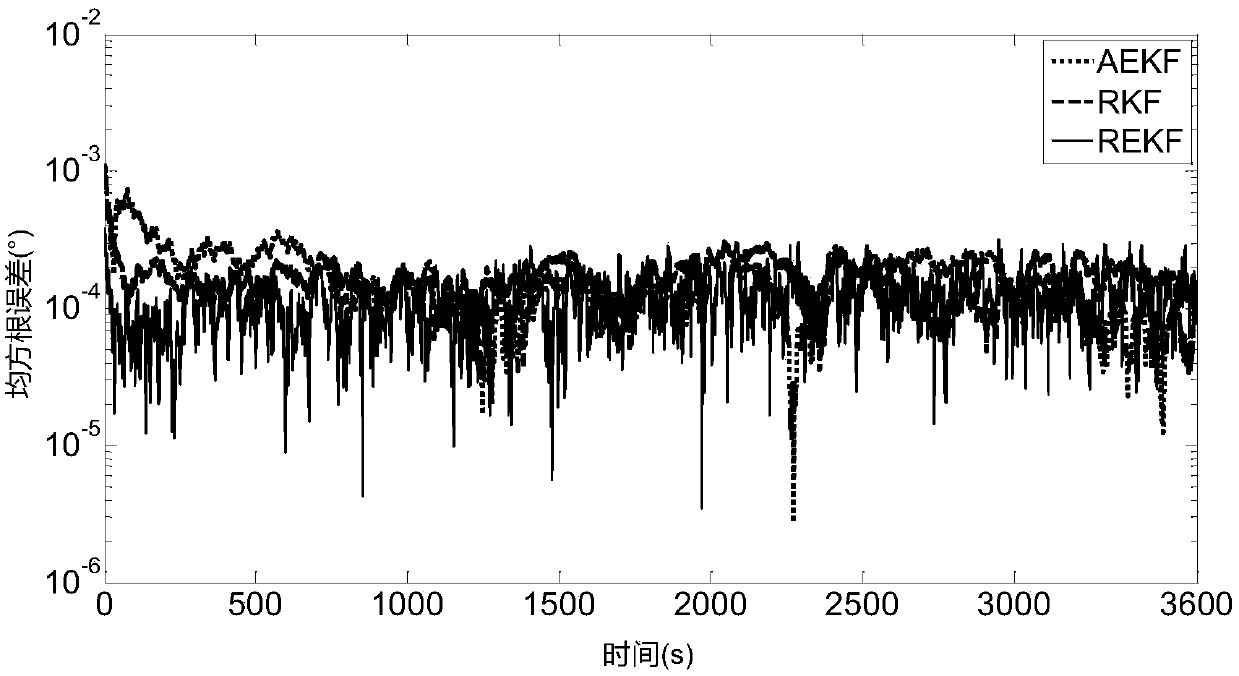
[0185] combine figure 2 and image 3 , when it is assumed that there is no delay in the system, the performance of each filtering algorithm is not much different, and the accuracy can basically reach about 0.0001deg. On the whole, the REKF and RKF filtering algorithms are slightly better than the AEKF filtering algorithm, because the AEKF algorithm has certain errors after nonlinear estimation, resulting in slightly worse filtering accuracy.
[0186] combine Figure 4 and Figure 5 , the robust extended Kalman filter algorithm (REKF) proposed by us is much better than the RKF filter algorithm and the AEKF filter algorithm in dealing with nonlinear systems with delay and multiplicative noise, because we have established a The time error m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More