

Multi-robot collaborative path following method based on deep learning
A multi-robot and deep learning technology, applied in the computer field, can solve problems such as large recognition delay, inability to recognize scene pictures from perspectives, long request response time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
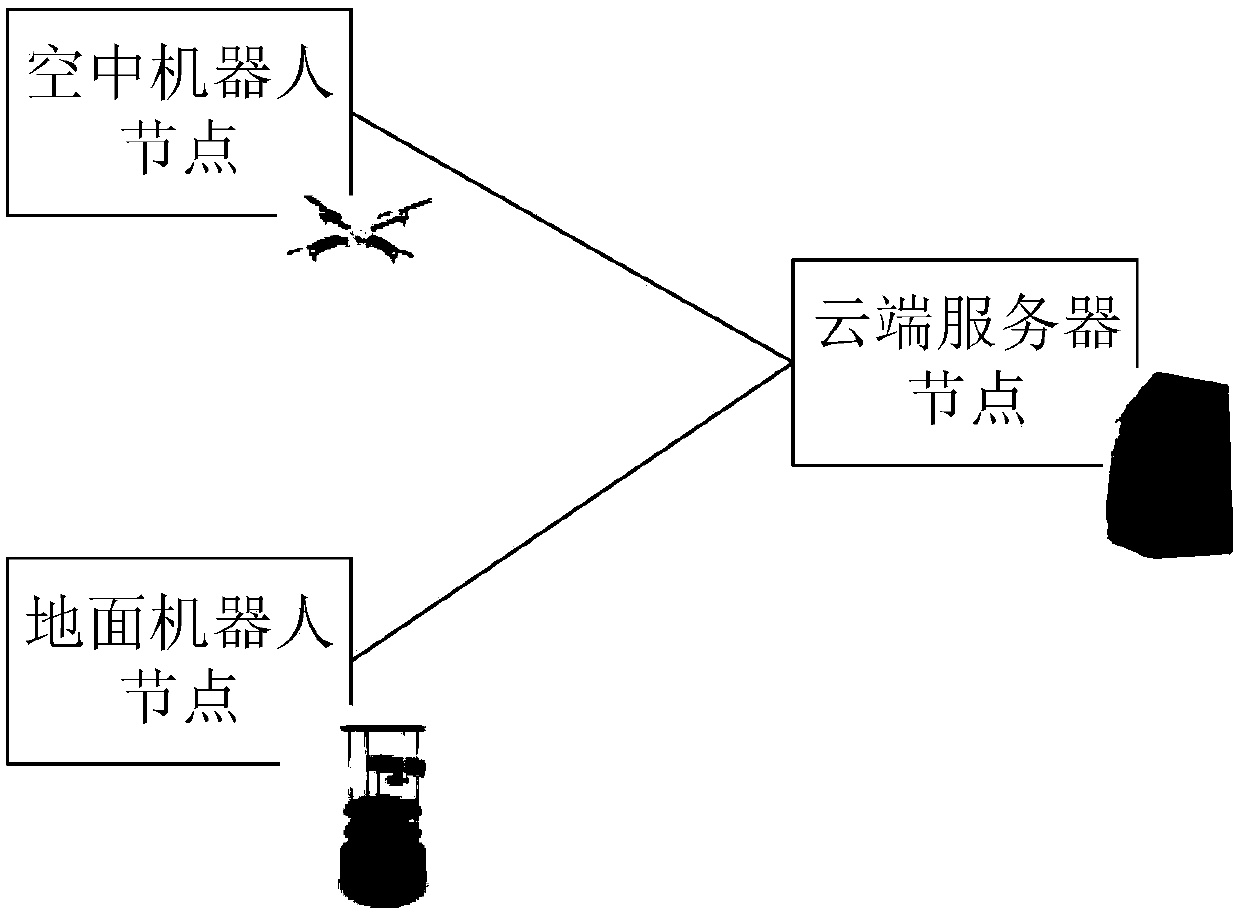
[0072] figure 1 It is the multi-robot environment constructed in the first step of the present invention, which is composed of ground robot nodes, aerial robot nodes and cloud server nodes. Ground / air robot nodes are robot hardware devices (such as unmanned vehicles / drones) that can perceive environmental information and receive speed commands. Cloud server nodes are resource-controllable computing devices with good computing power, which can run computing-intensive Or knowledge-intensive robotics applications.
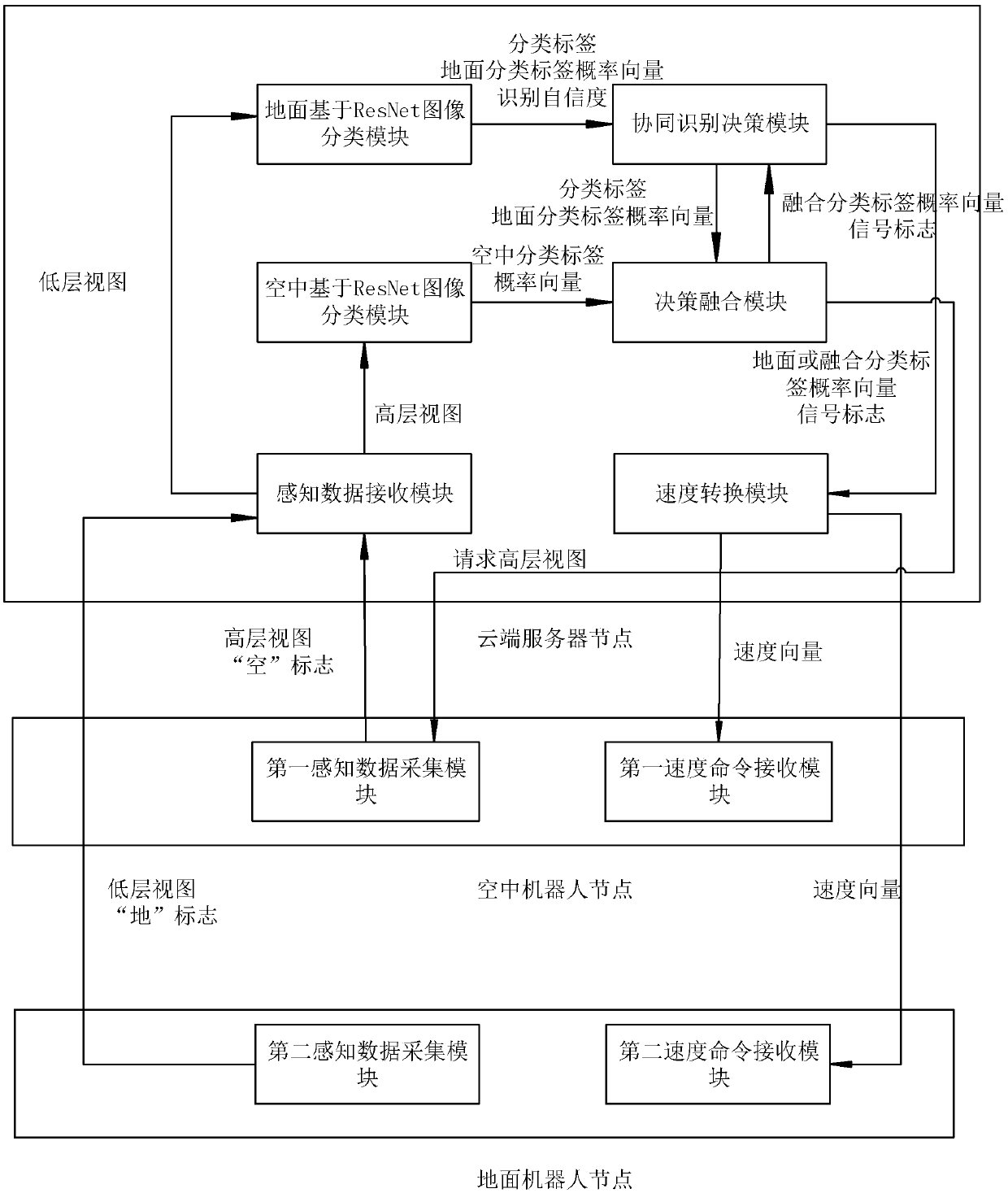
[0073] figure 2 It is a software deployment diagram on ground and aerial robot nodes and cloud server nodes of the present invention. The robot computing node is a robot hardware device that can move in the environment and receive speed commands. It has a camera sensor on it. The cloud server nodes are equipped with the operating system Ubuntu and the Caffe deep learning model framework. In addition, the ground and air robot nodes are also equipped with a percepti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More