

Force/position hybrid control method of multi-arm teleoperation robot based on performance function
A hybrid control and teleoperation technology, applied in the field of teleoperation, can solve the problems beyond the scope of the actuator's capabilities, unable to complete the operation tasks autonomously, and excessive operation force/torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
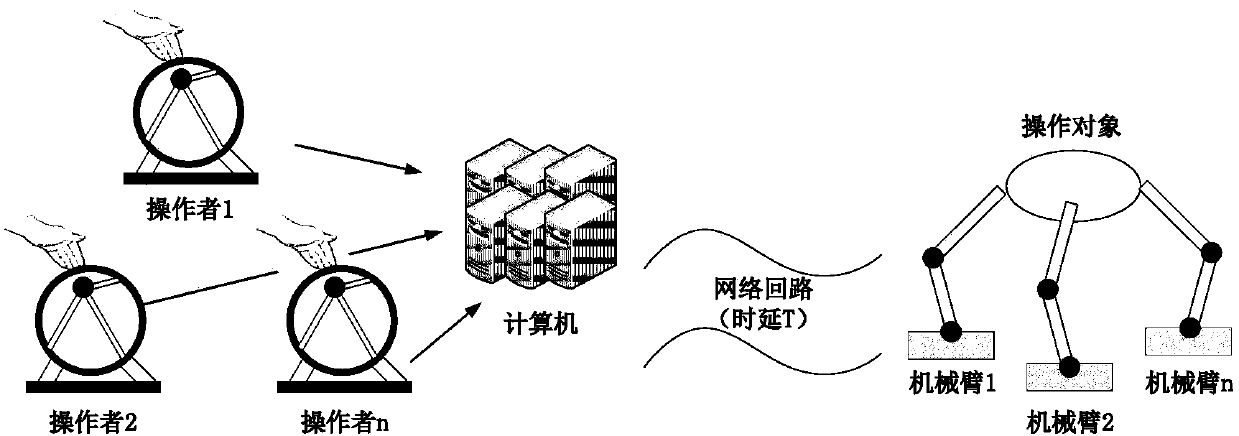
[0043] The present invention considers that the space multi-arm robot cooperates to operate a location target in an unstructured space environment, and there is a corresponding relationship between the multi-arm robot and multiple operators, that is, the number of operators is the same as the number of arms of the space robot. like figure 1 As shown, during the operation, the operator transmits the control information to the computer by operating an independent hand controller, and the computer transmits the control command to the robotic arm through the network loop, and the robotic arm transmits the position and force information measured by the sensor after operation to the controller, and then the controller will reflect the feedback information to each operator's manipulator. It includes the following four steps:
[0044] 1. Establish the dynamic model of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More