

Method for correcting track errors generated during iterative learning of industrial robot
An industrial robot and iterative learning technology, which is applied in the field of iterative learning and correction of trajectory errors of industrial robots, can solve the problems of rapid error divergence and failure of learning convergence algorithm, and achieve the effects of improving accuracy, improving trajectory running accuracy and reducing following error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
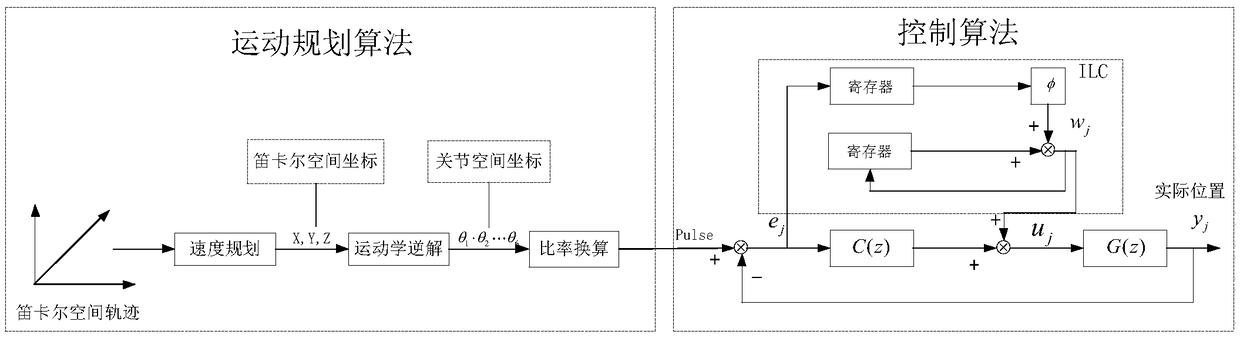
[0063] Such as figure 1 Shown: The motion planning algorithm mainly studies the attitude of the robot's end effector, the route it travels, and the speed planning during the action process, that is, to study what kind of speed and what kind of posture the robot runs on what kind of trajectory. For example, the welding torch of an arc welding robot accelerates at a certain angle, then decelerates at a constant speed, and repeatedly runs a section of straight line welding seam of the automobile shell. In this process, the linear weld seam is firstly discretized into a series of Cartesian space position (position) and time (time) points according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More