

Underwater node positioning method oriented to sound velocity profile
A technology of sound velocity profiling and node location, which is used in the re-radiation of sound waves, the use of re-radiation, measurement devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 2
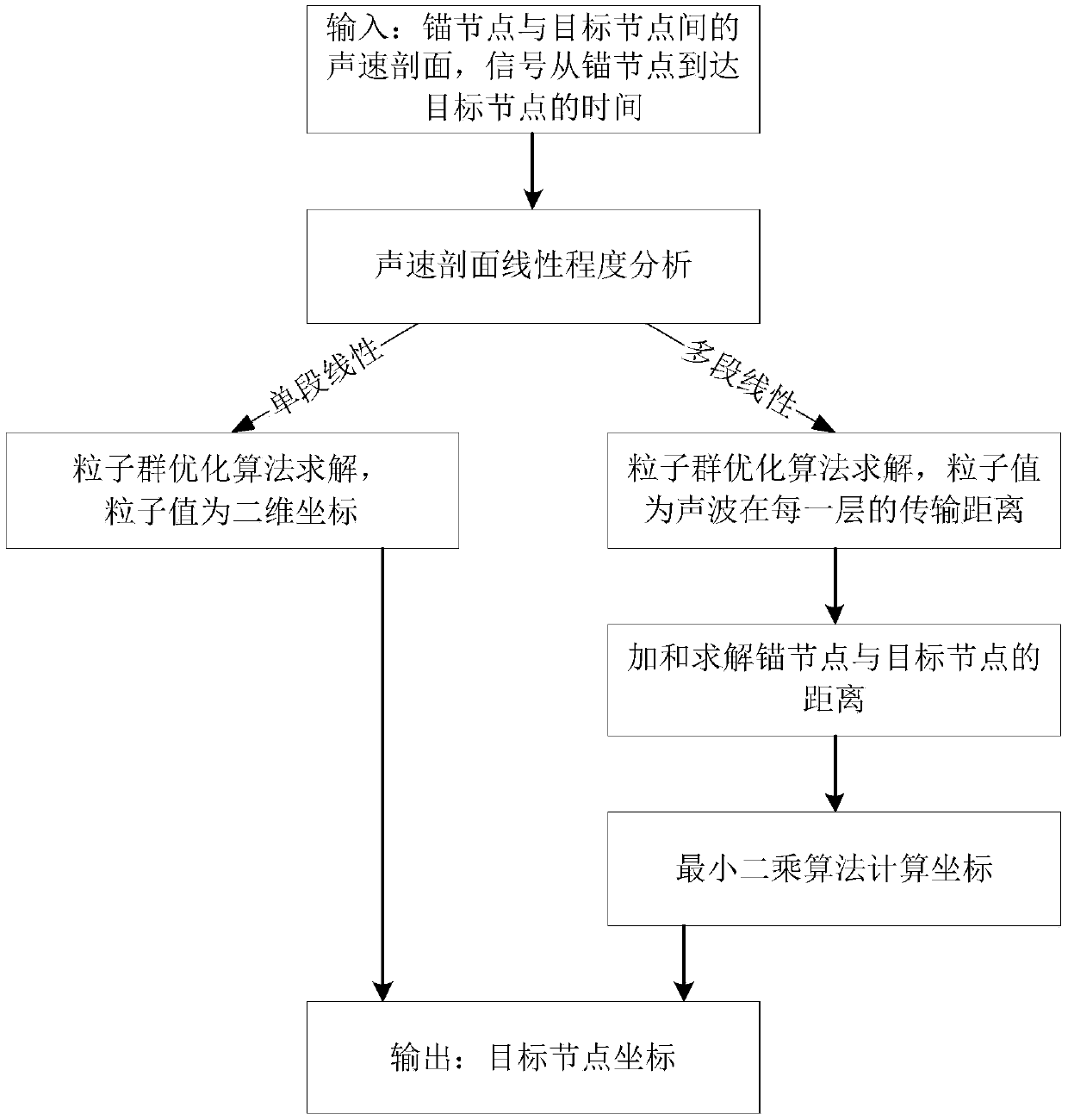
[0077] The underwater node positioning method facing the sound velocity profile of the present invention analyzes the linearity of the sound velocity profile according to the following method:
[0078] The sound velocity profile is segmented and linearized according to the degree of linearity to ensure that in each segment, the sound velocity and water depth change approximately linearly. Preferably, a greedy algorithm is used to analyze the linearity of the input sound velocity profile, which has the following steps:
[0079] (1) Initial: Assuming that the number of observed data points of the sound velocity profile is n, the entire sound velocity profile is divided into consecutive non-overlapping segments, is the round-down function. Regression lines in each segment were fitted using ordinary least squares regression.
[0080] (2) Iteration: Calculate the error increase caused by combining all adjacent segments into a regression line, and replace the two adjacent regre...
specific Embodiment approach 3
[0082] The underwater node positioning method facing the sound velocity profile of the present invention analyzes the linearity of the sound velocity profile according to the following method:
[0083] Both the anchor node and the target node are equipped with depth sensors, and the sound velocity profile linearization model to be used is determined according to the depth of the anchor node and the target node.
[0084] If the sound velocity profile between the anchor node and the target node is a single-segment linear, the single-segment linear sound velocity profile model is used;
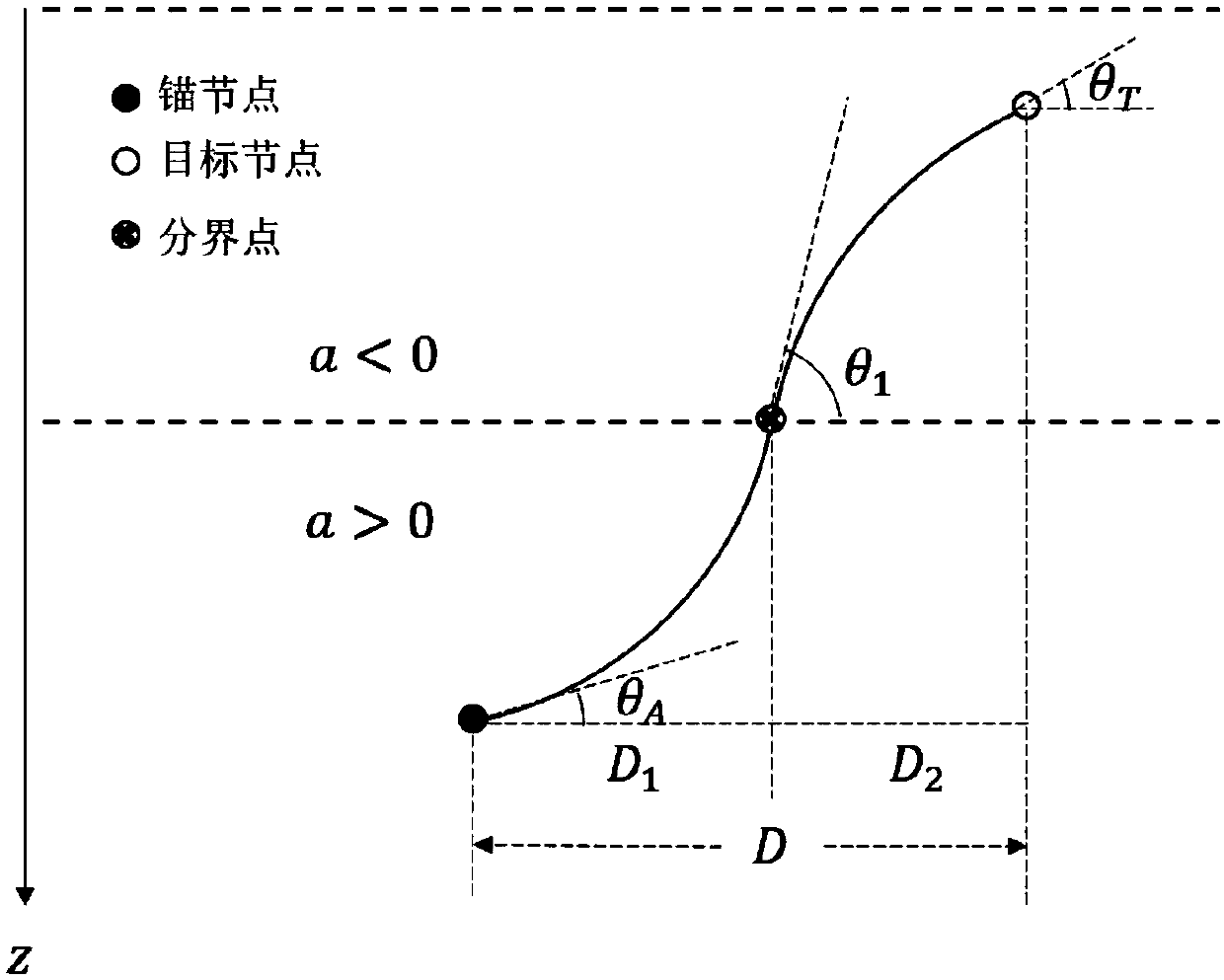
[0085] If the sound velocity profile between the anchor node and the target node is multi-segment linear, a multi-segment linear sound velocity profile model is used, and in each segment, the sound velocity and water depth change approximately linearly.
specific Embodiment approach 4
[0086] In the positioning method of the single-segment linear sound velocity profile model of the present invention, the single-segment linear sound velocity profile is as follows:
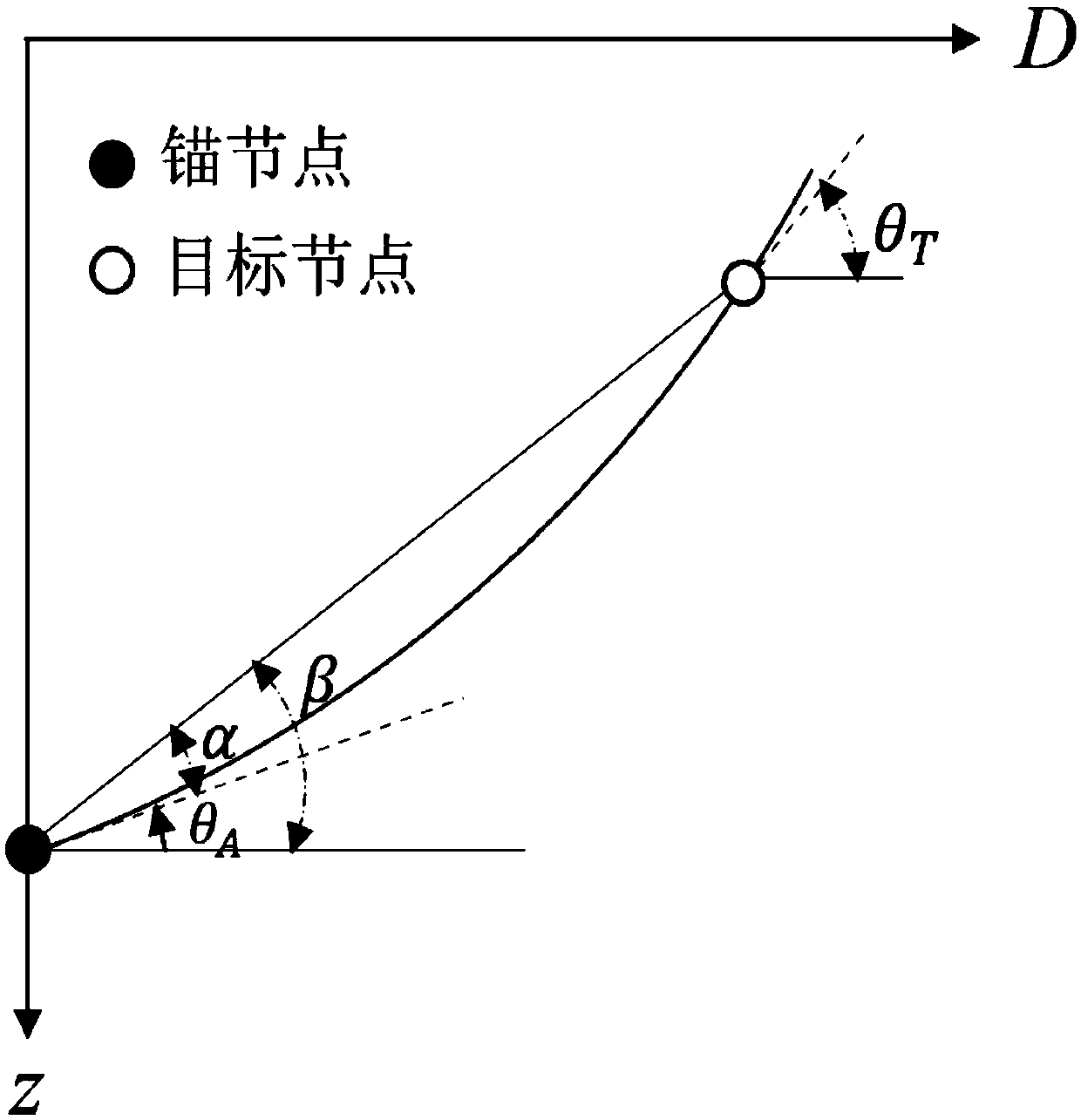
[0087] In the case of a single-segment linear sound velocity profile, when the underwater acoustic sound velocity profile is a single-segment linear, such as figure 2 shown, usually expressed as
[0088] C(z)=az+b (1)
[0089] Among them, a is the slope of the linear sound velocity profile, b is the intercept of the linear sound velocity profile, that is, the sound velocity at the horizontal plane, the sound velocity parameters a and b can be measured in advance, z is the water depth, and C(z) is the sound velocity at this depth.
[0090] Under the single-segment linear sound velocity profile, the sound propagation trajectory from the anchor node to the target node is a circular arc. Suppose a > 0, and the depth of the anchor node is greater than the depth of the target node, ie z A >z T , at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More