

Full drive auv recovery control system and autonomous recovery method
A technology of control system and recycling method, which is applied in the field of robotics, can solve problems such as high requirements for controllers and positioning algorithms, decreased convergence, and weight degradation, and achieves good tracking and filtering effects, improved stability, and increased success rate. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] The present invention will be further described below in conjunction with the accompanying drawings and specific examples.
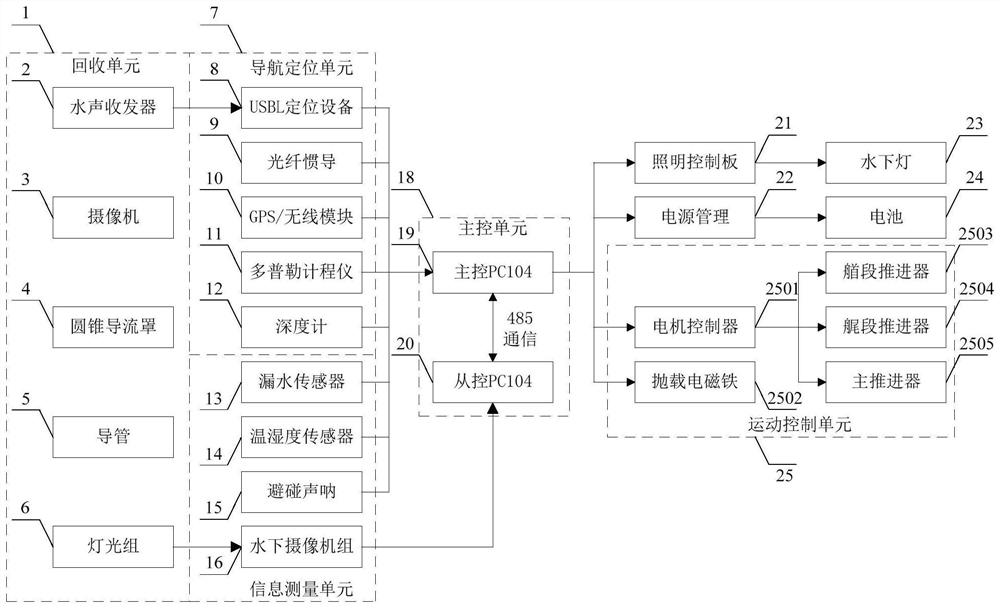
[0086] Such as figure 1 As shown, the AUV recovery control system consists of a recovery unit 1 and an AUV underwater control system. The recovery unit 1 is placed on the seabed plane or suspended on the ship by a bracket, and the underwater control system is installed on the fully driven autonomous underwater robot.
[0087] figure 1 The middle recovery unit 1 adopts a bell-mouth method, and its external structure is composed of a conical guide cover 4 and a conduit 5 . Among them, the underwater acoustic transceiver 2 is installed on both sides of the conical guide cover 4; the light group 6 includes 4 underwater lights, which are installed on the outer edge of the conical guide cover 4 in a rhombus geometric relationship; the camera 3 is installed on the circular guide cover 4 The rear part and the 5 necks of the conduit are used for base st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More