

Control system and dynamic positioning method of underwater auxiliary oil recovery robot
A control system and dynamic positioning technology, applied in the field of robotics, can solve the problems of lack of underwater light irradiation and camera shooting, low dynamic positioning accuracy, and no consideration of the complexity of ocean conditions, so as to improve accuracy, ensure positioning accuracy, and be good Anti-interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
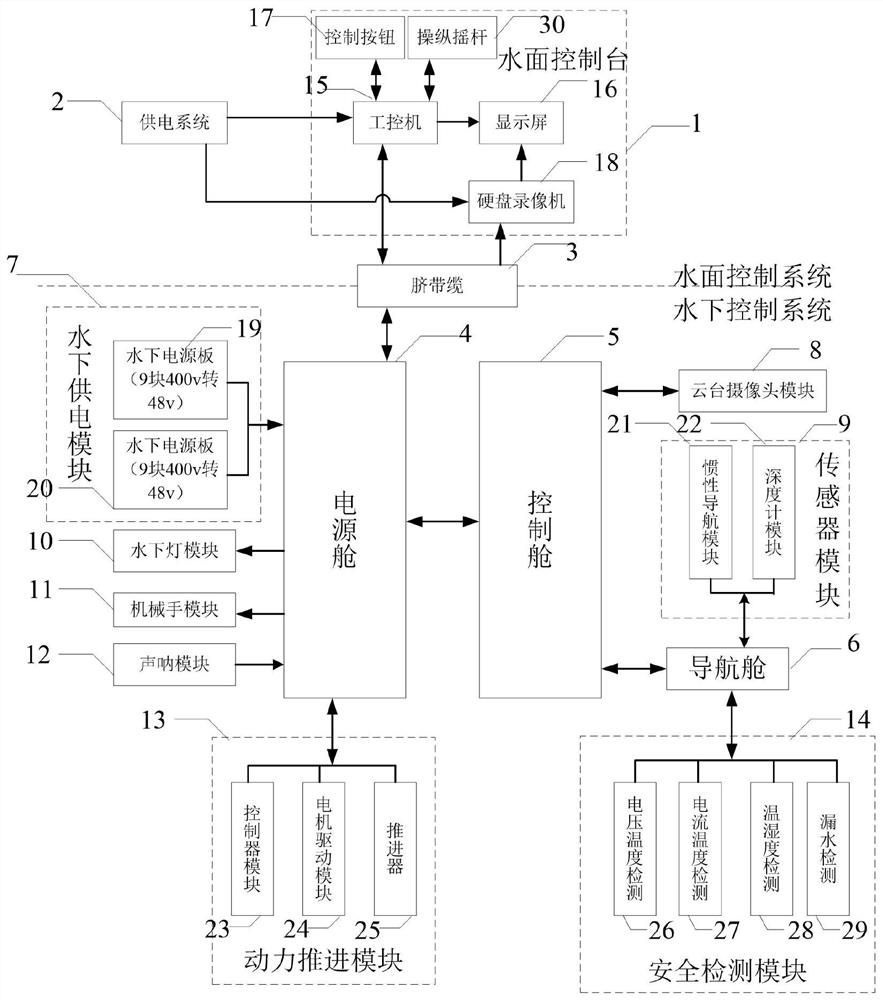
[0099] Such as figure 1 As shown, the underwater auxiliary oil production robot control system includes a water surface control system and an underwater control system. The water surface control system is placed on the shore or on the mother ship, and the underwater control system is installed on the underwater auxiliary oil production robot; The control system includes a surface console 1, a power supply system 2, and an umbilical cable 3. The surface console 1 and the umbilical cable 3 are respectively connected to the power supply system 2 to provide energy and data transmission for the underwater auxiliary oil recovery robot body. The underwater control system The underwater power supply module 7 included in the power supply cabin 4, the underwater light module 10, the manipulator module 11, the sonar module 12, the power propulsion module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More