

Control method and system for mobile robot platform on the basis of ROS (Robot Operating System)
A mobile robot and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of robot real-time decline, insufficient production flexibility, and extended production line length, so as to reduce data processing costs and improve production flexibility. performance, the effect of reducing the amount of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The present embodiment is the embodiment of the control method of the mobile robot platform based on ROS, comprises the following steps:
[0040] S1. Detect the surrounding environment through the laser radar, and upload the detected data to the Raspberry Pi, and process it through the SLAM algorithm to obtain the environmental distribution map;
[0041] Specifically, install the ROS operating system on the Raspberry Pi as the basis of the ROS-based mobile robot platform, use the ROS operating system to build the urdf model of the robot platform, and the specific files of the model can be obtained through SolidWorks software or Gazebo in the robot ROS operating system Establish. The operation of the mobile robot platform is simulated in Gazebo, and the environment distribution map is obtained through the instant localization and mapping (SLAM) algorithm, and the simulated environment is matched with the real environment.
[0042] S2. When the producer does not issue a ...
Embodiment 2
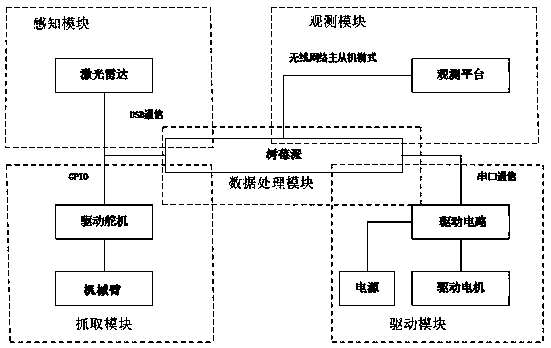
[0057] Such as figure 1 Shown is the embodiment of the control system of the mobile robot platform based on ROS of the present invention, comprises data processing module and the perception module connected with data processing module, observation module, grasping module and driving module:
[0058] The observation module is a graphic display module, and the graphic display module is set on the operating system of the mobile robot, and the operating system is connected to the producer's computer;
[0059] The grasping module includes a driving steering gear and a mechanical arm, the driving steering gear is connected to the data processing module, and the mechanical arm is connected to the driving steering gear;
[0060] The driving module includes a driving circuit, a driving motor and a power supply, the power supply is connected to the driving circuit, and the driving motor is connected to the driving circuit; the driving module is arranged on a mobile chassis, and the mobi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More