

Air-aspiration type manipulator for diamond inlaying and pasting industrial robot
An industrial robot, air-suction technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of high cost, complicated control system structure and program design, etc., to achieve a simple structure, expand the applicable environment, and facilitate future cleaning. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Attached below Figure 1-3 Specific examples of the present invention are described.
[0018] The following examples facilitate a better understanding of the present invention, but do not limit the present invention. In the following embodiments, those related to the control circuit are conventional control methods unless otherwise specified. The components used in the following examples are commercially available unless otherwise specified.
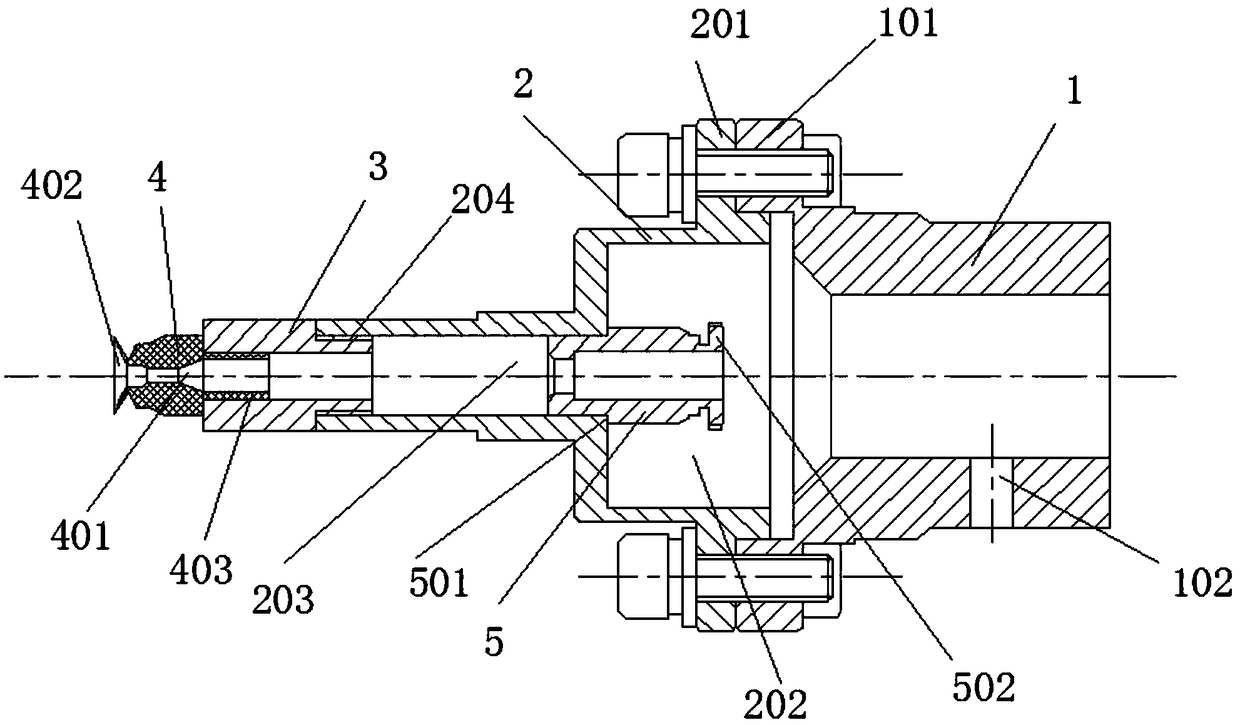
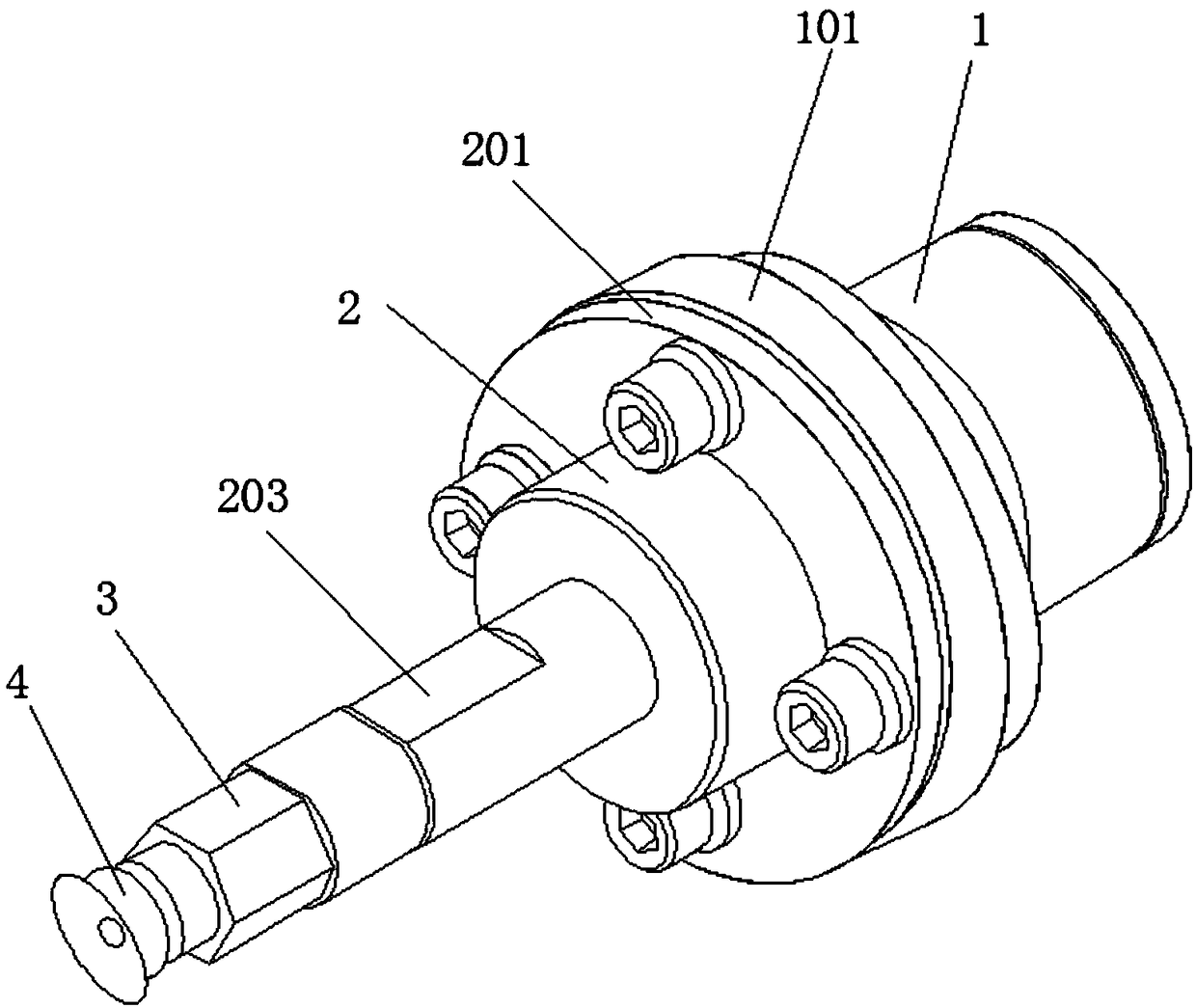
[0019] The air-suction manipulator used for diamond-studded and drill-attached industrial robots has a mounting pipe seat 1, a variable-diameter stepped pipe 2, an extension pipe 3 and a suction cup 4 for the execution end of the diamond-studded and drill-attached industrial robot air-suction manipulator. Characterized by: such as figure 1 As shown, the installation pipe seat 1 is made with a robot flange connection ring I101 protruding outward, and is coaxially tightened by the robot flange connection ring I101 and the robot f...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More