

Kalman filtering moving target positioning method based on inertial navigation system assisted single satellite positioning
A Kalman filter and positioning method technology, which is applied in the field of inertial navigation system assisted positioning and Kalman filter fusion, least squares-Newton iteration, and can solve problems such as poor positioning accuracy, poor positioning stability, and difficult dynamic target positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
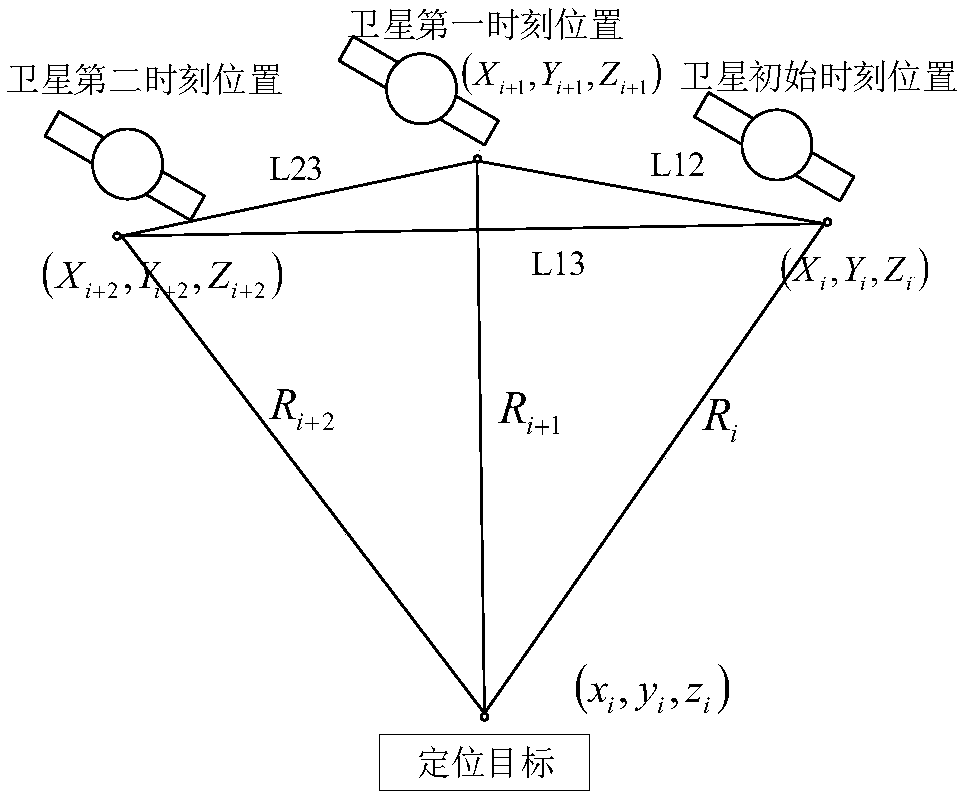
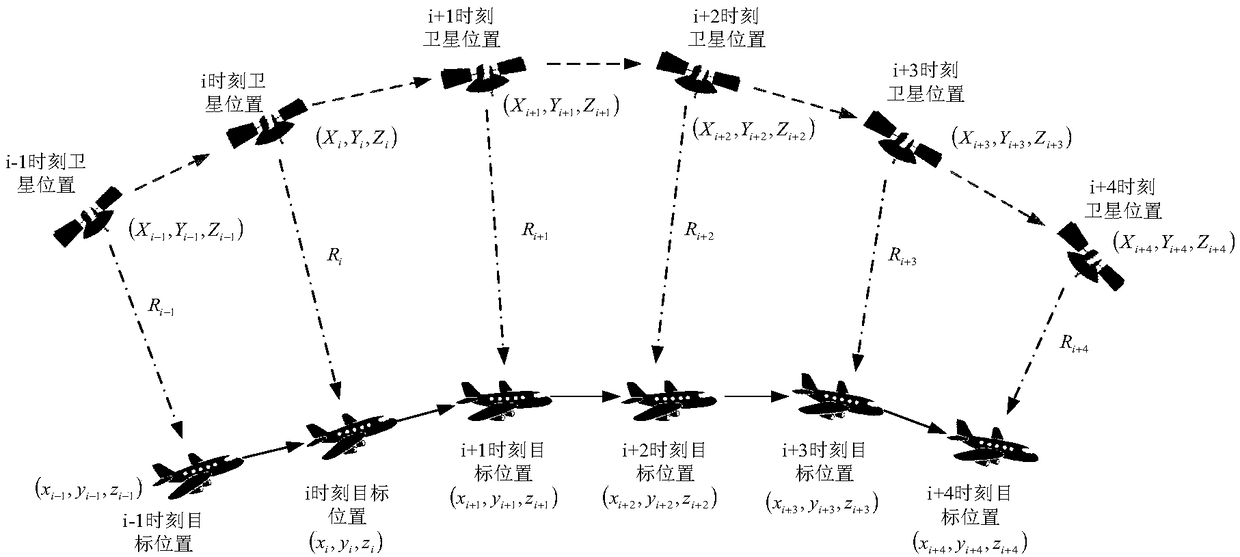
[0071] The Kalman filter moving target positioning method based on inertial navigation-assisted single-satellite positioning of the present invention combines the fast convergence performance of the least squares algorithm and the stable tracking performance of the Kalman filter, and uses the pseudo-range values between satellites and targets at three moments Combined with the altitude value obtained by the altimeter, the basic positioning of the target is realized; and in order to ensure the accuracy of single-satellite positioning in a dynamic environment, the present invention makes full use of the INS system for the least squares-Newton iteration of the previous stage and the Kalman iteration of the latter stage. Filtering provides dynamic real-time displ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More