

Full-automatic road roller location method based on multi-source data fusion
A multi-source data and positioning method technology, applied in the direction of electromagnetic wave re-radiation, measuring devices, instruments, etc., can solve problems such as inability to work, insufficient stability, weakened GPS signals, etc., to solve poor positioning accuracy, improve labor productivity, Avoid the effect of missing signal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, specific implementations are now described in detail.
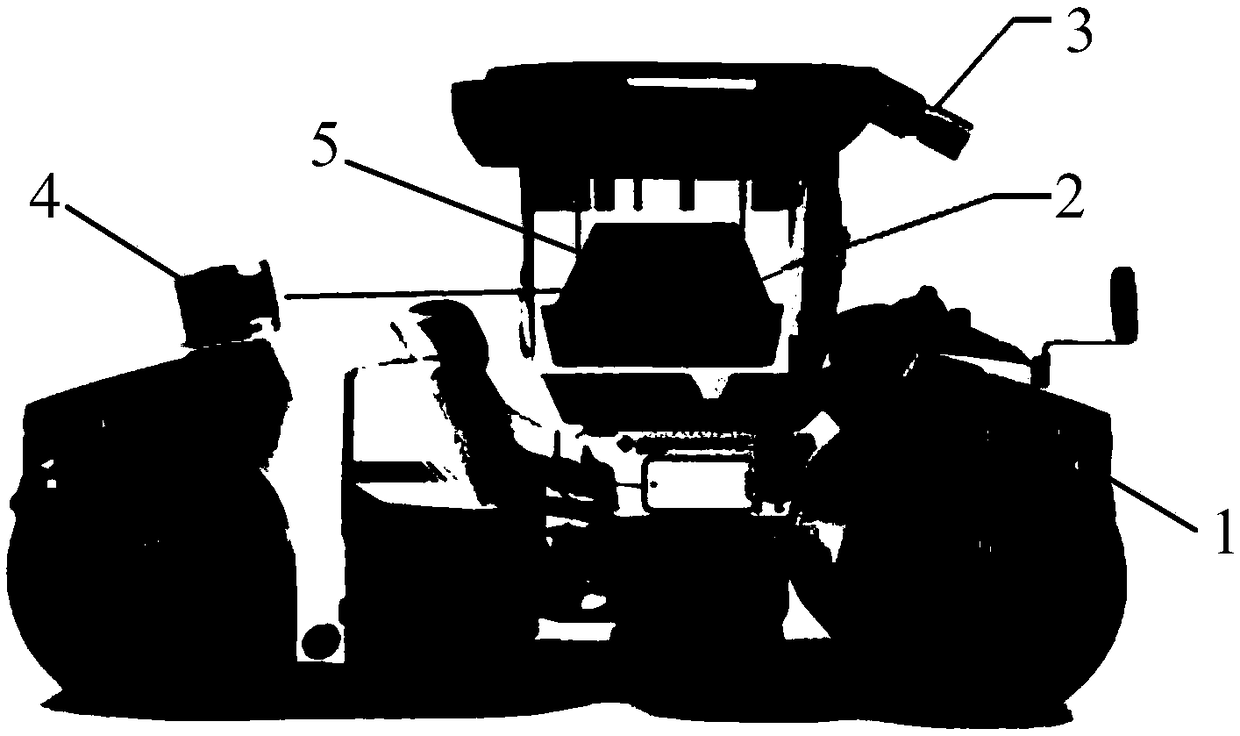
[0046] The present invention is based on the multi-source data fusion automatic road roller positioning method, setting boundary marks at the boundary of the construction area, multi-channel synchronous cameras to obtain images containing the boundary marks, and using laser radar to obtain point cloud data of the construction area, and combining the image with the laser point cloud The data is matched, the construction area signs are identified, and the construction fence area is calculated; the position and attitude information of the road roller in the construction area is calculated by fusion of laser point cloud data and IMU output information, and the positioning of the unmanned road roller in the construction area is realized.
[0047] Such as figure 1 As shown, the industrial computer 2 is set u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More