

Device and method for active grasping of manipulator based on multimodal fusion
A technology for grasping devices and manipulators, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of lack of automatic real-time interaction and learning process, difficulty in grasping, sensor disturbance, etc., and achieve improved positioning and active grasping ability, avoid strong light interference, and improve the effect of grasping success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that for those of ordinary skill in the art, several changes and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
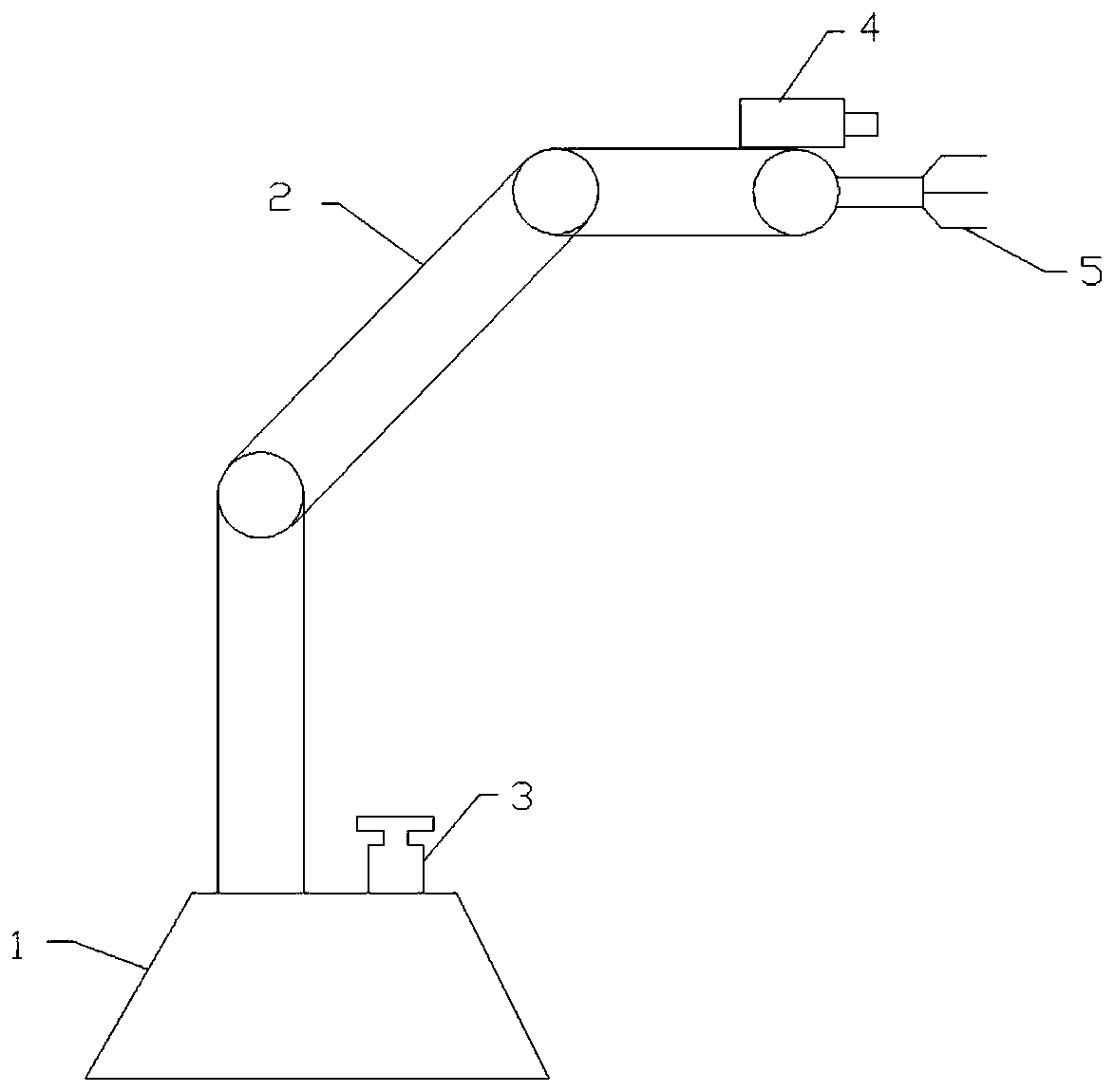
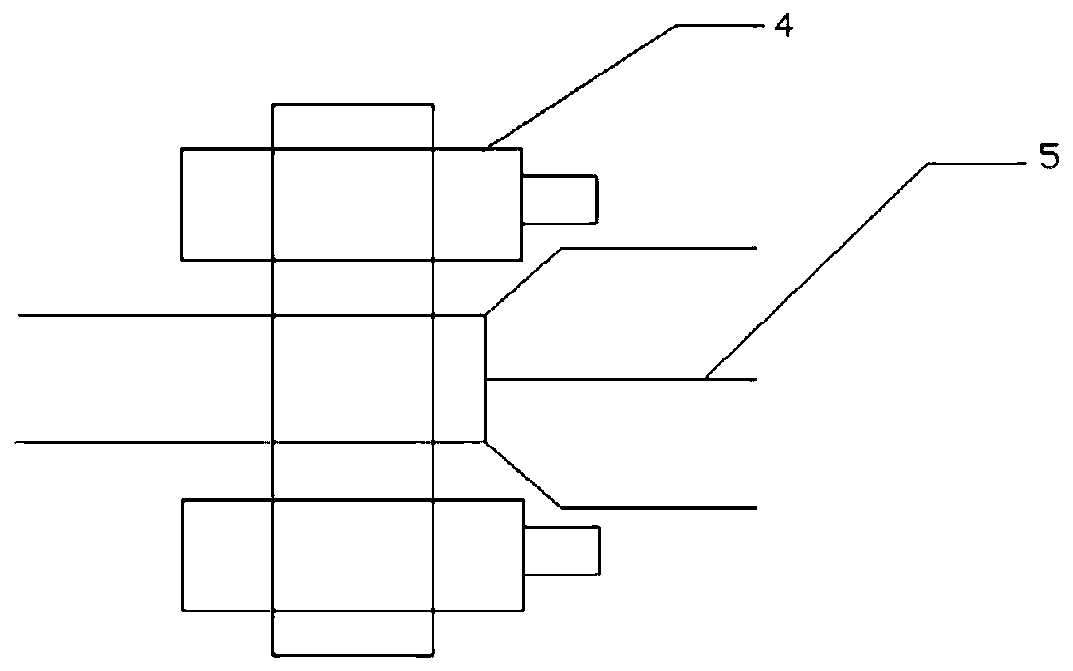
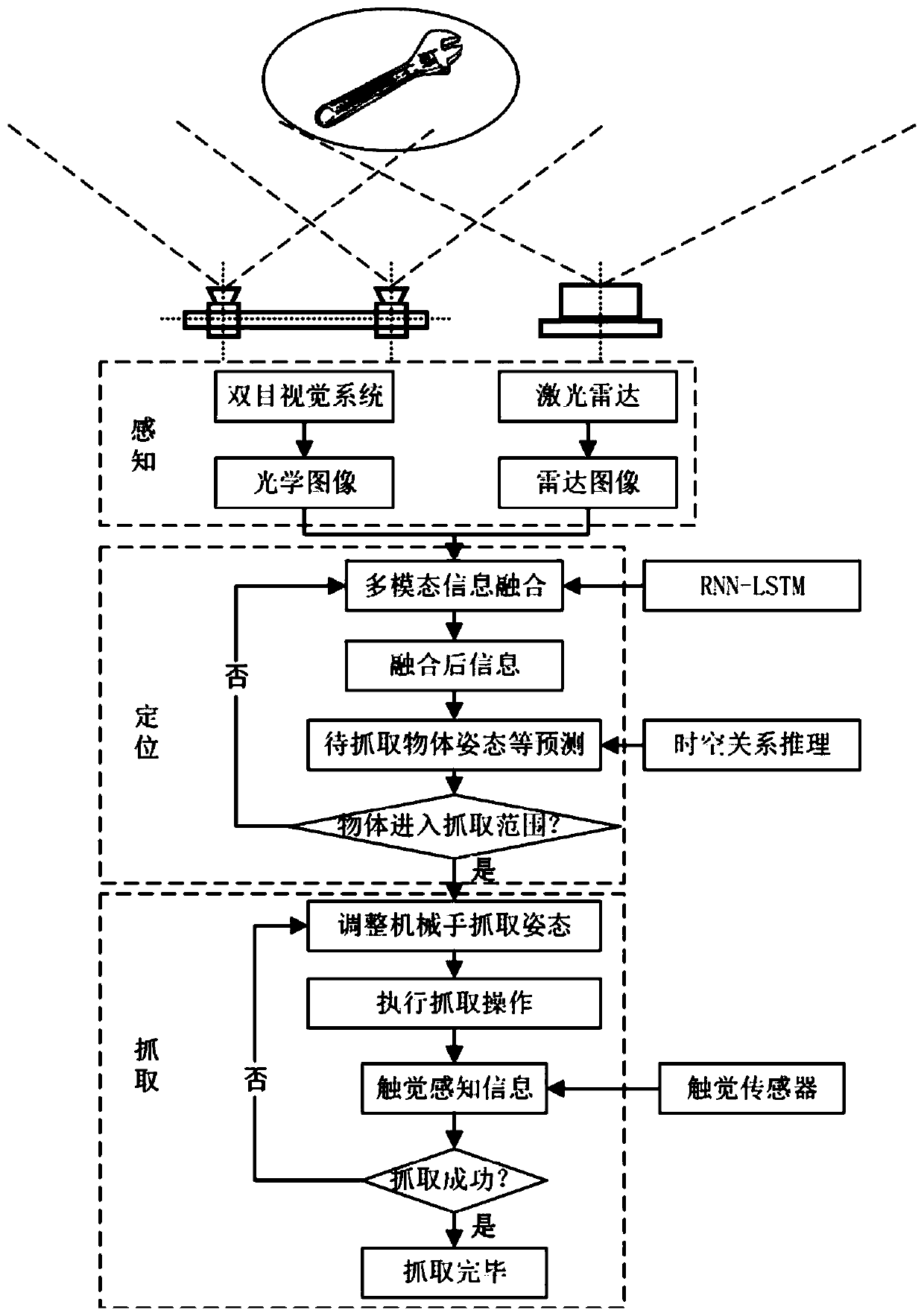
[0035] The invention aims at the problem that the binocular vision system is difficult to accurately obtain the information of the moving object to be grasped due to environmental factors such as bad light in space and electromagnetic field, and monitors the surrounding objects in a microgravity environment in real time by introducing a lidar, and uses a cyclic neural network-long-short-term memory network The algorithm is the RNN-LSTM algorithm for information fusion of radar images and v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More