

An intelligent cleaning robot and its path planning method
A cleaning robot and path planning technology, applied in the field of smart cars, can solve the problems of missed and repeated cleaning of rooms and corners, low cleaning area coverage, and long cleaning time, so as to achieve short cleaning efficiency, reduce labor intensity, and save cleaning the effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
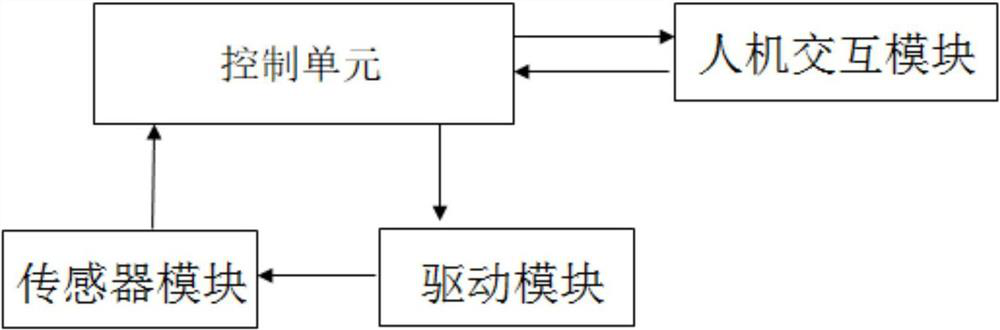
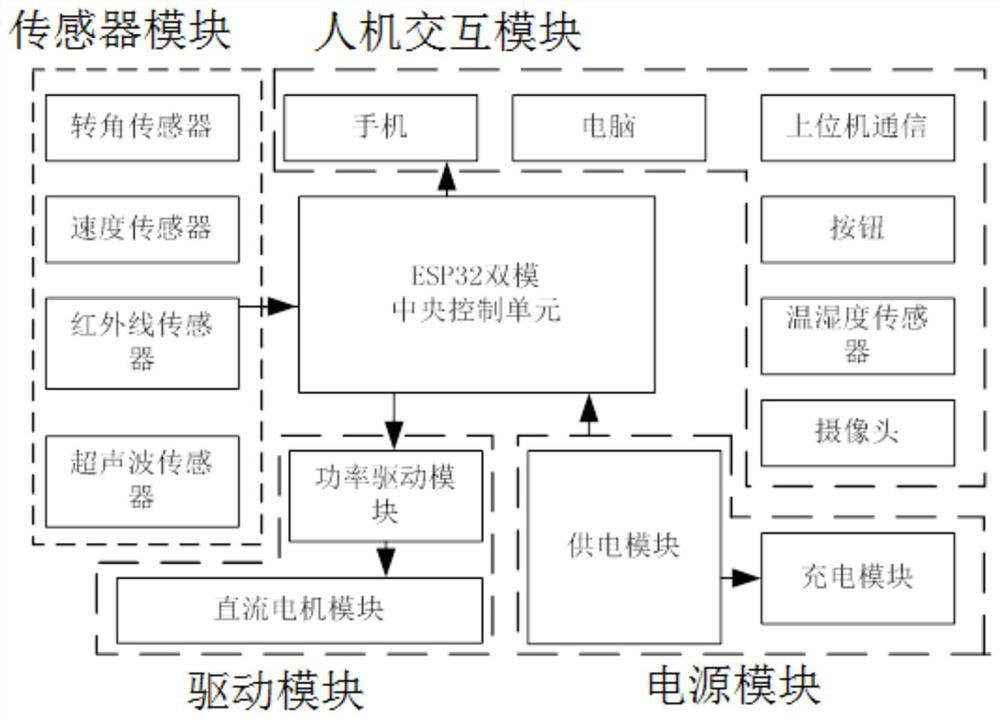
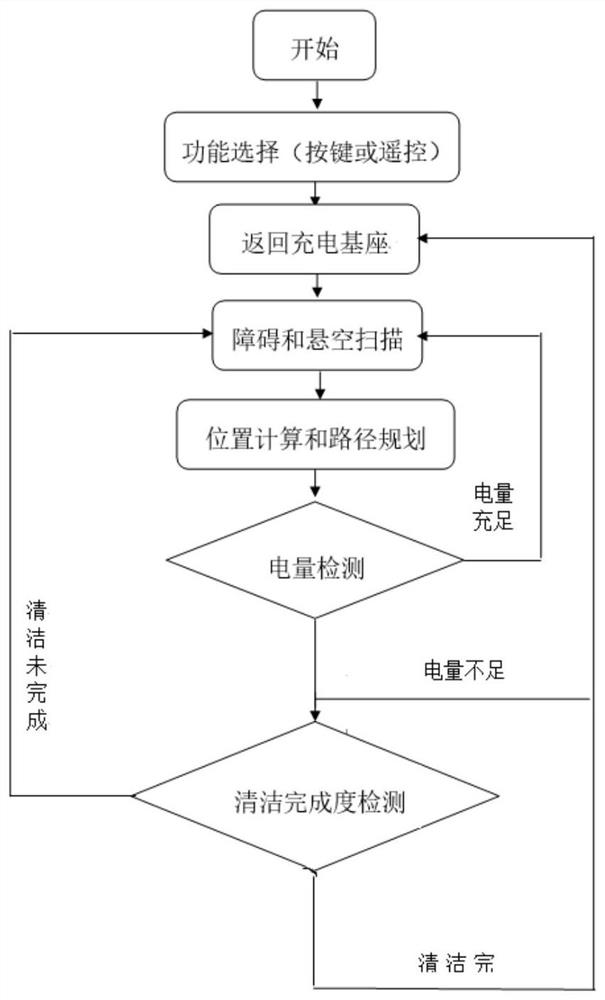
[0058] see figure 1 , an intelligent cleaning robot of the present invention includes a control unit, a drive module, a sensor module, a human-computer interaction module, a precise positioning module and a power supply module, and the drive module, the sensor module, the human-computer interaction module and the power supply module are respectively connected to the control unit; The sensor module is used to analyze and feed back real-time cleaning environment information; the precise positioning module is used to obtain the location of the current intelligent cleaning robot on the environmental map; the control unit adopts ESP32 dual-mode central control unit to obtain external environmental information, using geometric- The topological hybrid map technology establishes an environmental map. By combining the environmental map and real-time location, the optimal cleaning path is planned with an advanced path planning algorithm, and the data is uploaded to the cloud platform fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More