

Motorized joint for programmable moving machine
A mobile and maneuverable technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
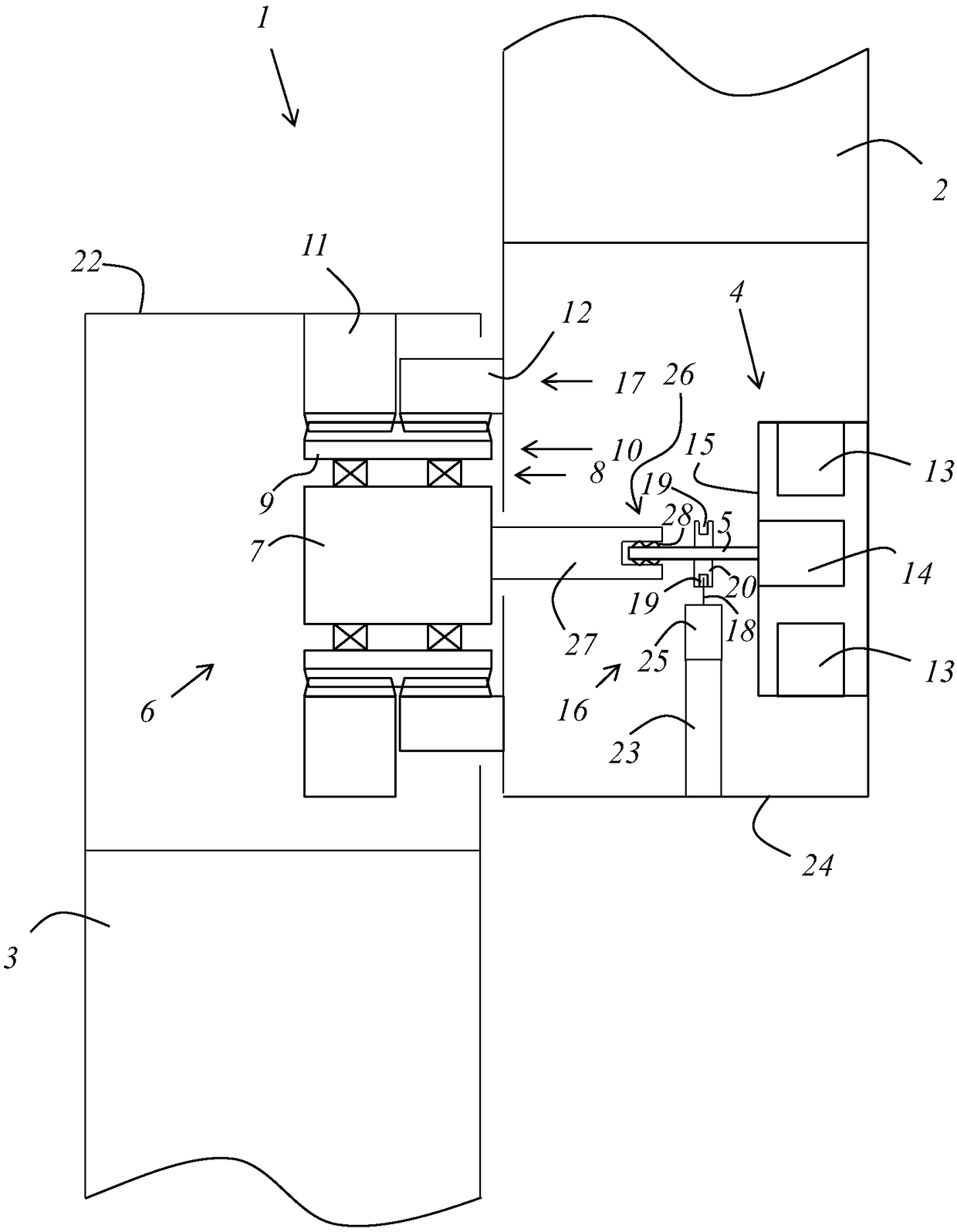
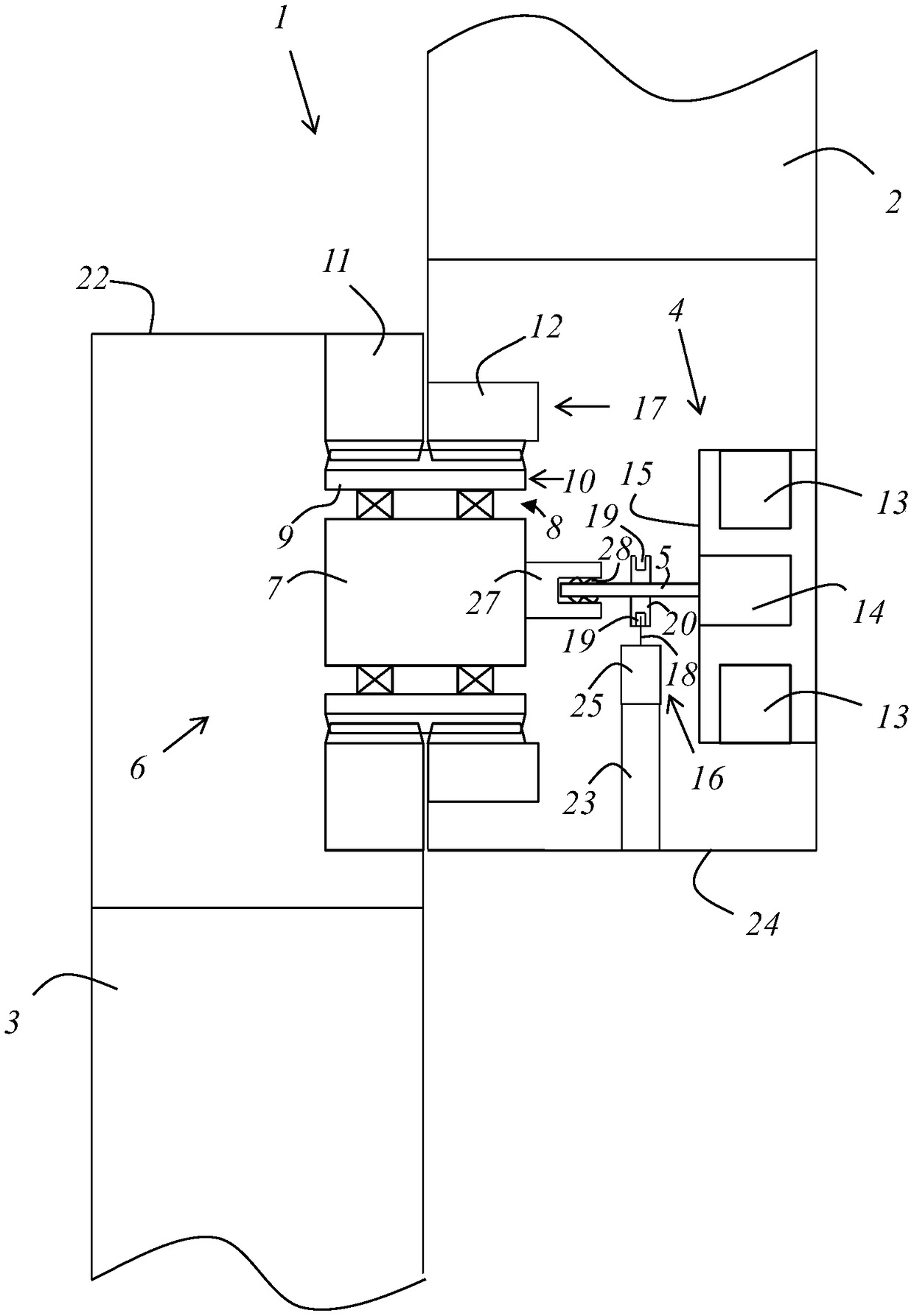
[0031] figure 1 A first exemplary embodiment of a motorized joint 1 for articulated connection of a first support 2 and a second support 3 of a programmable robot is shown. The motorized joint 1 contains a drive motor 4 with a driven shaft 5 and a transmission 6 downstream of the drive motor 4 in terms of transmission. The transmission 6 is designed as a stress wave transmission.
[0032] The motorized joint 1 has a first housing part 24 and a second housing part 22 . The first housing part 24 is rigidly connected to the first carrier 2 , while the second housing part 22 is rigidly connected to the second carrier 3 . Alternatively, it is also possible that the housing of the first support additionally also serves as the first housing part 24 and / or that the housing of the second support additionally also serves as the second housing part 22 .
[0033] In this exemplary embodiment, the drive motor 4 is arranged in the first housing part 24 and the gear mechanism 6 is arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More