

Planning method for recovering autonomous underwater vehicle (AUV) through guide cable of surface unmanned ship
A technology for underwater vehicles and unmanned ships, which is applied in navigation, surveying and navigation, navigation calculation tools, etc., and can solve problems such as hydrodynamic influence, difficult dynamic docking, and deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
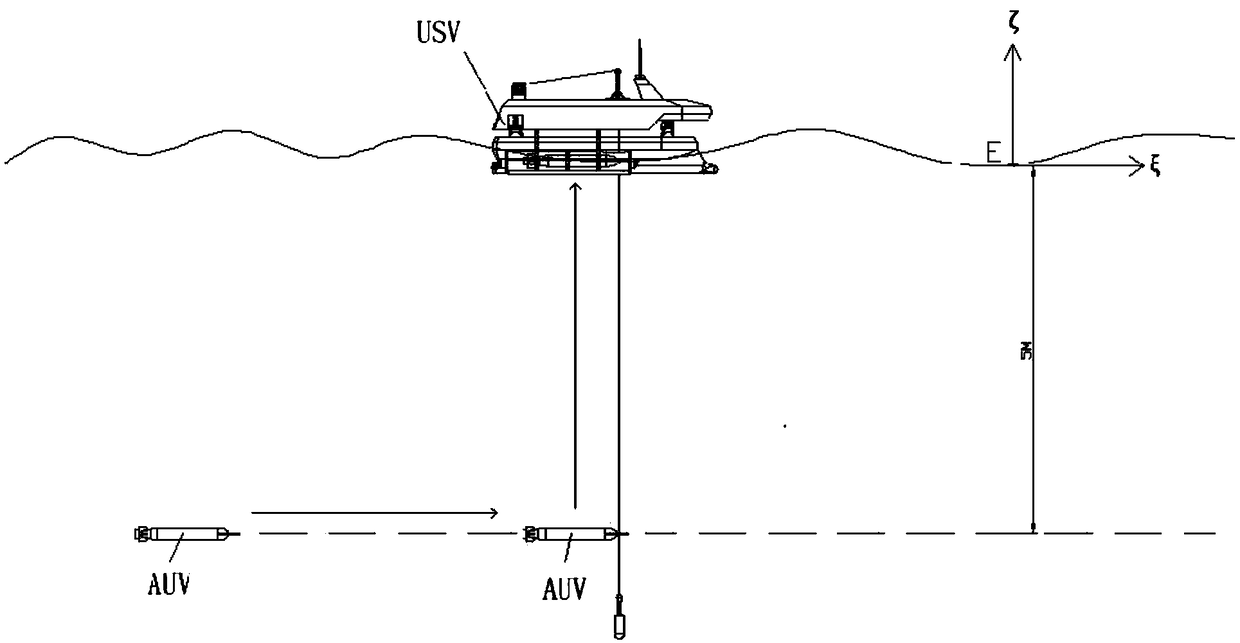
[0068] The present invention is realized by but not limited to the following device system scheme: the whole system is composed of surface unmanned vessel USV, autonomous underwater vehicle AUV and the equipment carried; the specific equipment used for recovery guidance and communication interaction of USV and AUV is as follows:
[0069] In addition to the equipment to ensure the normal operation of the USV, the present invention also requires the USV to be equipped with: a GPS positioning system, a wireless communication antenna, the main matrix of the USBL ultra-short baseline positioning system, and a wind direction sensor;
[0070] In addition to the equipment to ensure the normal operation of the AUV, the present invention also requires the AU...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More