

A small unmanned aerial vehicle adjustable bird claw type mechanical gripper device
A technology of small unmanned aerial vehicles and mechanical grippers, which is applied in the directions of manipulators, aircraft parts, transportation and packaging, etc., and can solve the problem that the structure of the unmanned aerial vehicle's grasping device is complex, cannot meet the daily production needs, and affect the flight stability of the unmanned aerial vehicle and other problems, to achieve the effect of increasing the practical range, obvious grasping effect and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below with reference to the embodiments shown in the drawings.
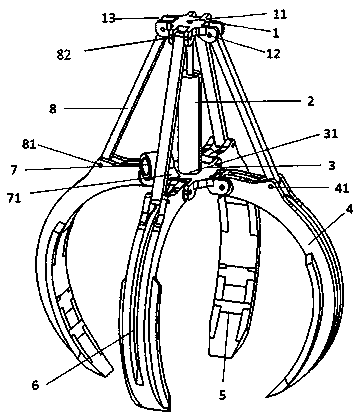
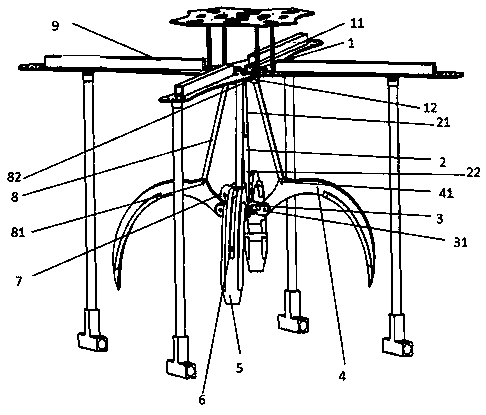
[0018] The lightweight and adjustable "bird claw" mechanical gripper of the present invention includes a gripper connecting plate 1, a power source structure 2, a gripper center connecting plate 3, a bird's claw large joint 4, a bird's claw small joint 5, and a concave notch 6. , Push rod connection port 7, power rod 8. The bird's claw joint 4, the bird's claw small joint 5, and the concave notch 6 are connected to form a single bird's claw structure. The bird's claw joint 4, the bird's claw small joint 5 and the gripper center connecting plate 3 are connected to form the bottom mechanism of the gripper , The power source structure 2 is respectively connected to the gripper connecting plate 1 and the gripper center connecting plate 3, and the power rod 8 connects the gripper connecting plate 1 and the gripper center connecting plate 3 to form the entire graspi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More