

A navigation and positioning system for an underwater glider and a correction method for floating accuracy
An underwater glider, navigation and positioning technology, applied in the field of navigation, can solve the problems of reduced navigation and positioning accuracy, diverging gliders, being affected by external bad weather, wave fluctuations, and ship occlusion, etc., so as to reduce navigation and positioning errors and accurately. The effect of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with specific embodiment and accompanying drawing:
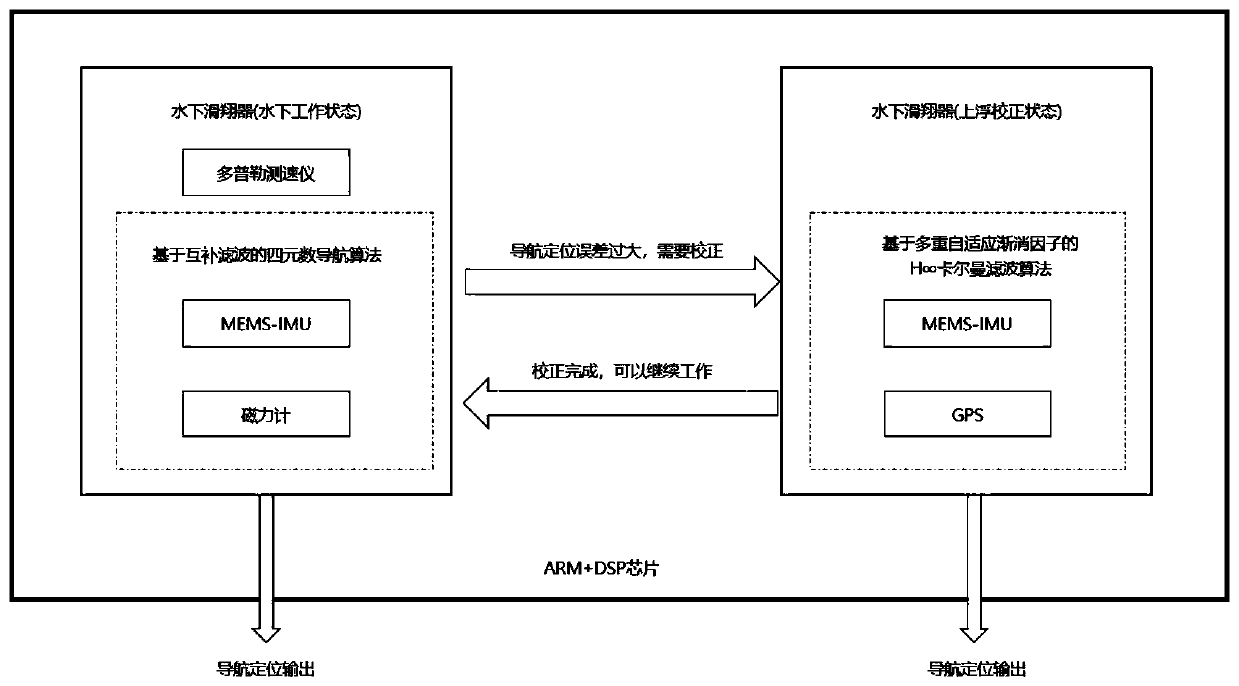
[0023] like figure 1 As shown, a kind of underwater glider navigation system disclosed by the present invention mainly comprises: microelectromechanical system inertial measurement unit (MEMS-IMU), global satellite positioning system receiving module (GPS), three-axis magnetometer, Doppler velocity measurement instrument (DVL), digital signal processing module (DSP), advanced reduced instruction set microprocessor (ARM).
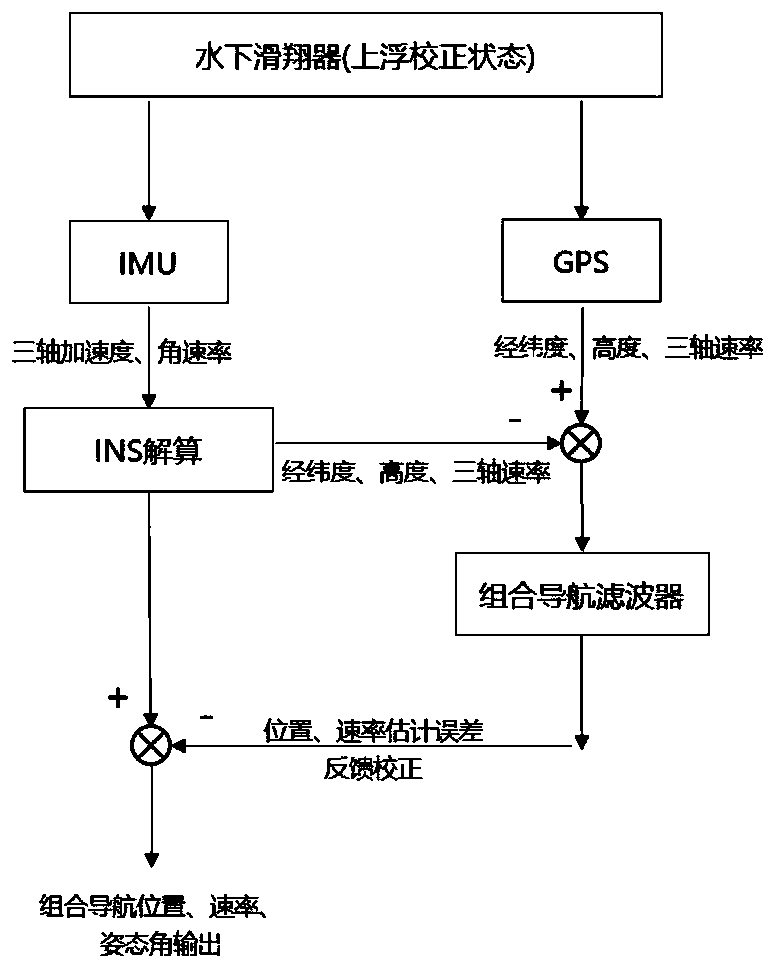
[0024] The MEMS-IMU integrates a three-axis accelerometer and a three-axis gyroscope, and the output three-axis acceleration and angular rate information obtains the attitude, velocity, and position navigation information of the underwater glider through an inertial navigation algorithm. At the same time, when the floating accuracy is corrected, the data is fused with the GPS signal to correct the navigation positioning error.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More