

Positioning method based on improved iterative volume particle filtering algorithm
A technology of particle filter algorithm and positioning method, which is applied in the field of positioning, can solve problems such as truncation error, unsatisfactory effect, and filtering problems, and achieve the effects of reducing calculation amount, improving approximation accuracy, and increasing operation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
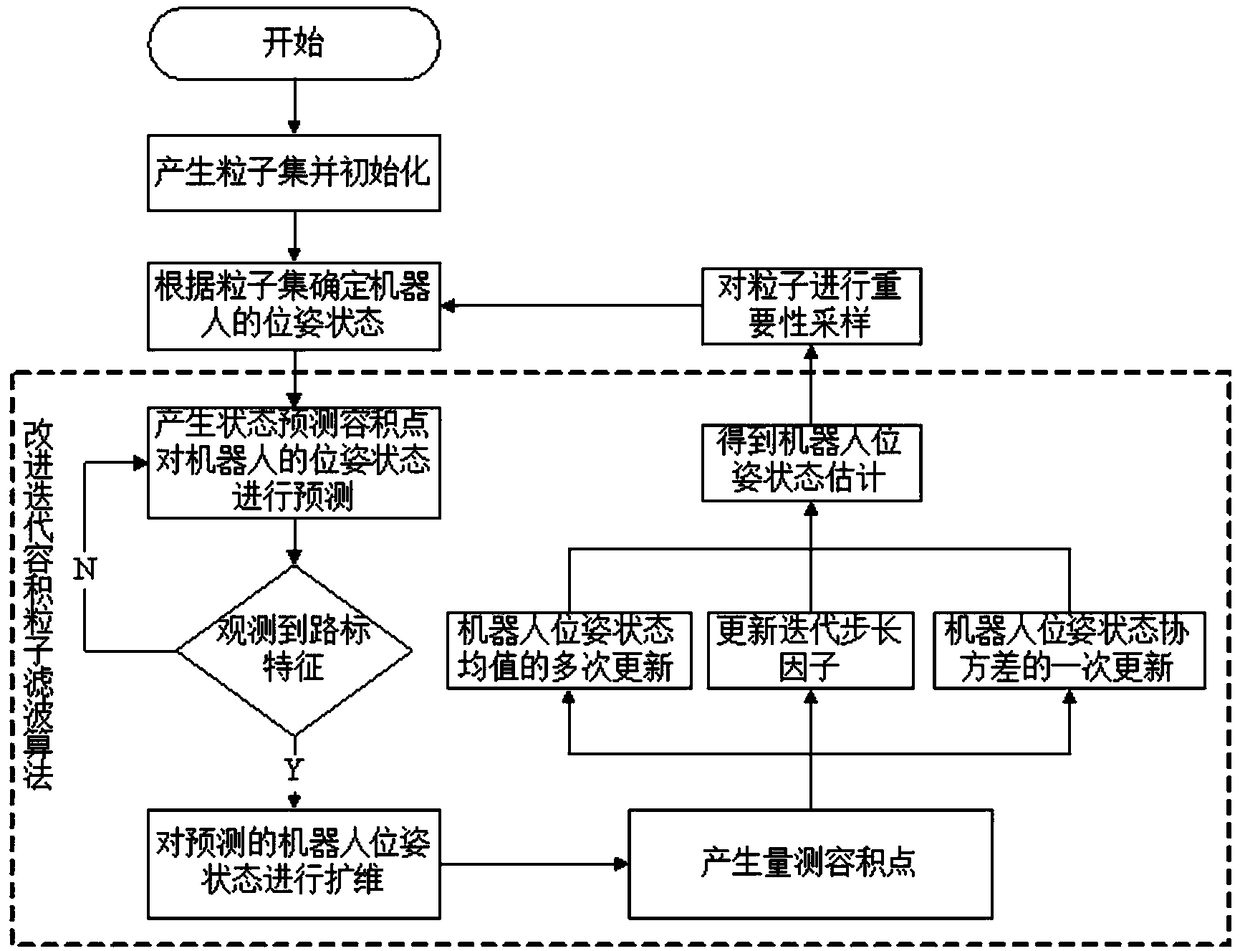
[0022] Such as figure 1 As shown, the positioning method based on the improved iterative volumetric particle filter algorithm of the present invention comprises the following steps:
[0023] (1) Determine the pose of the robot according to the particle set: generate a particle set composed of multiple particles and initialize, where Represents the estimated value of the i-th particle to the mean value of the robot state at time k, express Represents the estimated value of the covariance of the i-th particle to the robot state at time k, Indicates the weight of the i-th particle at time k. in each particle with The initial value of can be set manually.
[0024] (2) Calculate the predicted value of the state mean and the predicted value of the state covariance
[0025] First, increase the dimension of the pose of the robot: combine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More