Unmanned aerial vehicle three-dimensional path planning method based on multi-strategy improved particle swarm optimization algorithm
A technology for improving particle swarm and route planning. It is used in navigation through velocity/acceleration measurement, navigation calculation tools, etc., and can solve problems such as local optimal solutions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] 3D environment design
[0049] (1) hilly environment
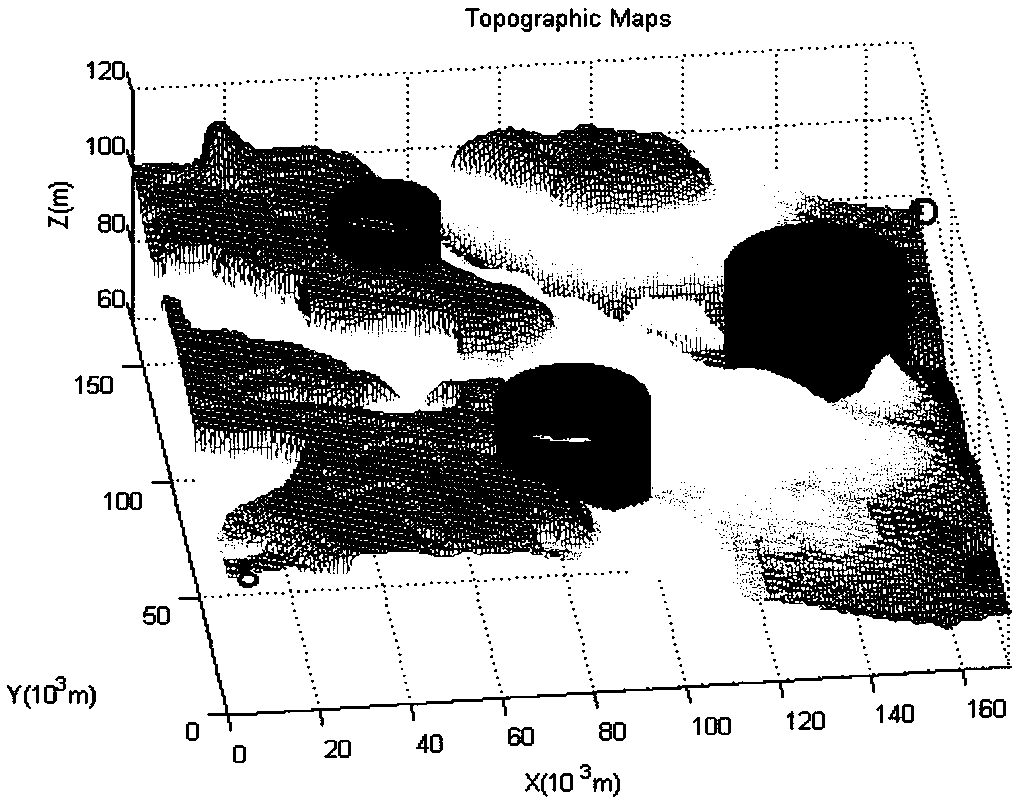
[0050] Hilly environment such as image 3 As shown, S and D represent the starting point and goal point of the task, respectively. Among them, the coordinates of the starting point in the initial state are (2,2,96), and the coordinates of the target point are (170,170,76). The three cylinders in the map are three-dimensional threat models with different threat ranges and different impact levels. The threat ranges (radius) are 12km, 17km, and 20km, respectively, where the specific location information of the threat source is expressed as (50,130,80,30), (80,42,80,25), (140,100 ,80,25). Where (x, y, z) is the geographic coordinates of the threat source in the coordinate system, and h is the effective height of the threat source; image 3 It is a hilly terrain environment map;
[0051] (2) Mountain environment
[0052] Mountain environment such as Figure 4 As shown, S and D represent the starting point and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com