

Rod-shaped object recognition-based mobile robot self-positioning system
A technology for rod-shaped objects and moving objects, applied in the field of robot navigation, can solve problems such as increased cost, large processor hardware requirements, and limited application occasions, and achieves low cost, high precision, real-time performance and good robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
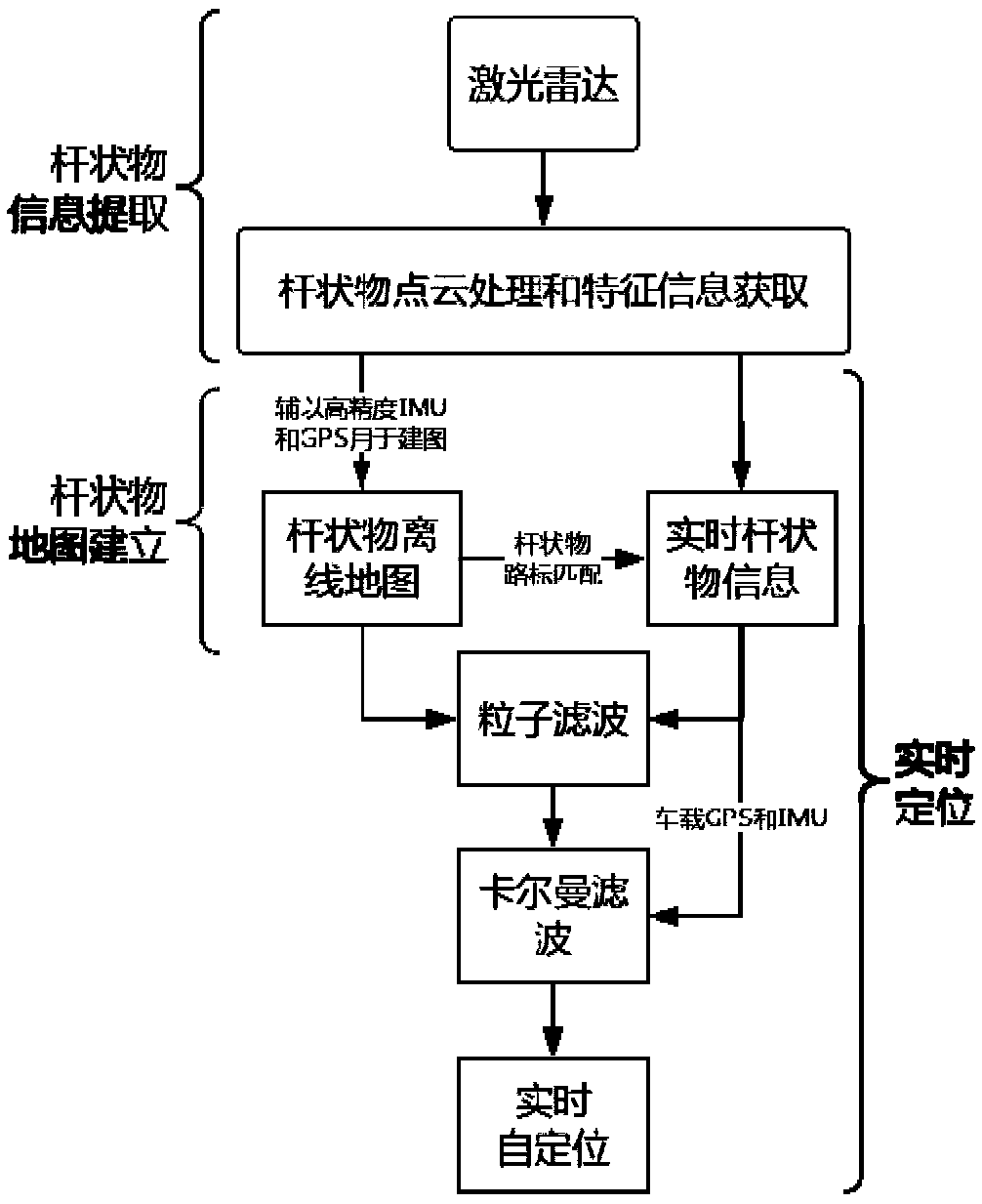
[0052] The invention provides a method for locating a moving object based on pole-shaped object recognition. The method is based on establishing pole map, extracting pole information and real-time positioning. The detailed flow chart is as follows: figure 1 shown. The method comprises the steps of:
[0053] (1) Constructing an offline map of rods;
[0054] (2), use the laser radar to obtain the point cloud data around the moving object, and extract the rod information from the point cloud data;
[0055] (3) Perform real-time positioning according to the pole-shaped object information and the pole-shaped object offline map, and obtain the positioning information of the moving object.
[0056]Wherein, the above-mentioned mobile object is a mobile vehicle or a mobile robot.
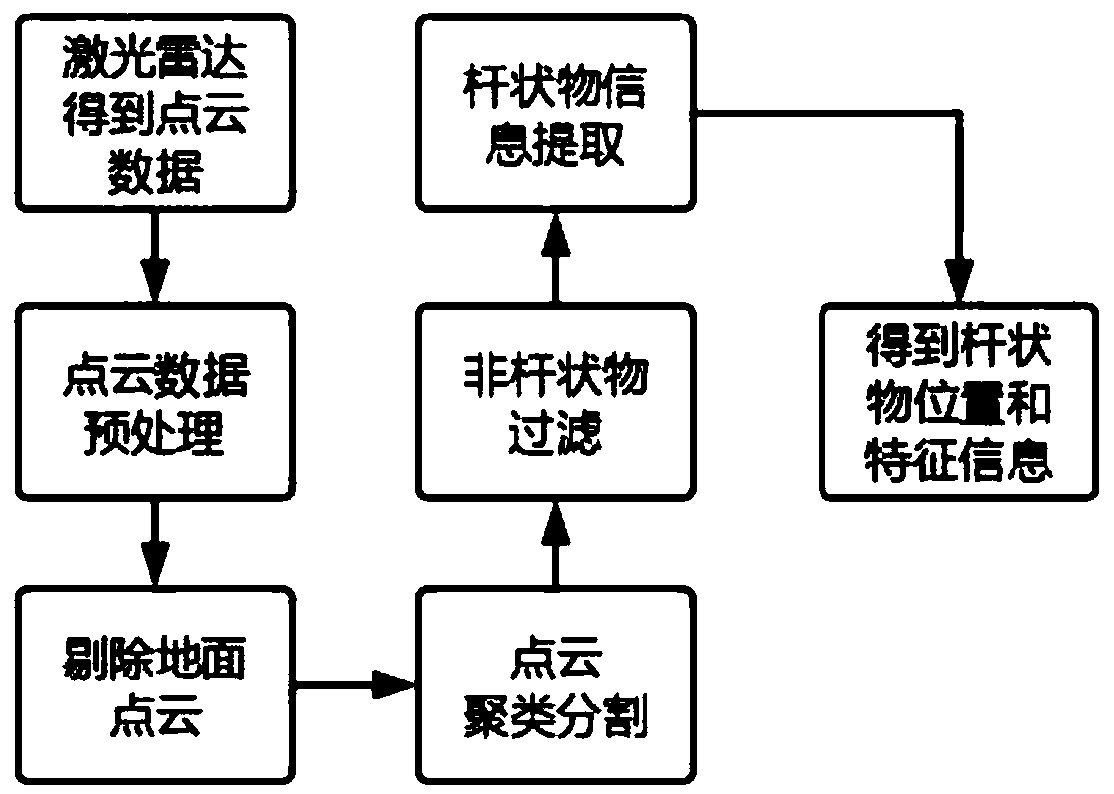
[0057] In step (1), constructing the pole-shaped object offline map includes the process of identifying the pole-shaped object. The detailed flow chart of this process is as follows figure 2 shown. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More