

Aircraft posture coupling rapid and stable control method based on mechanical arm driving
A stabilization control method and technology for aircraft, applied in attitude control, non-electric variable control, three-dimensional position/channel control, etc., can solve the problems of consuming spacecraft, difficult to achieve the expected design effect, difficult to replenish jet fuel, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
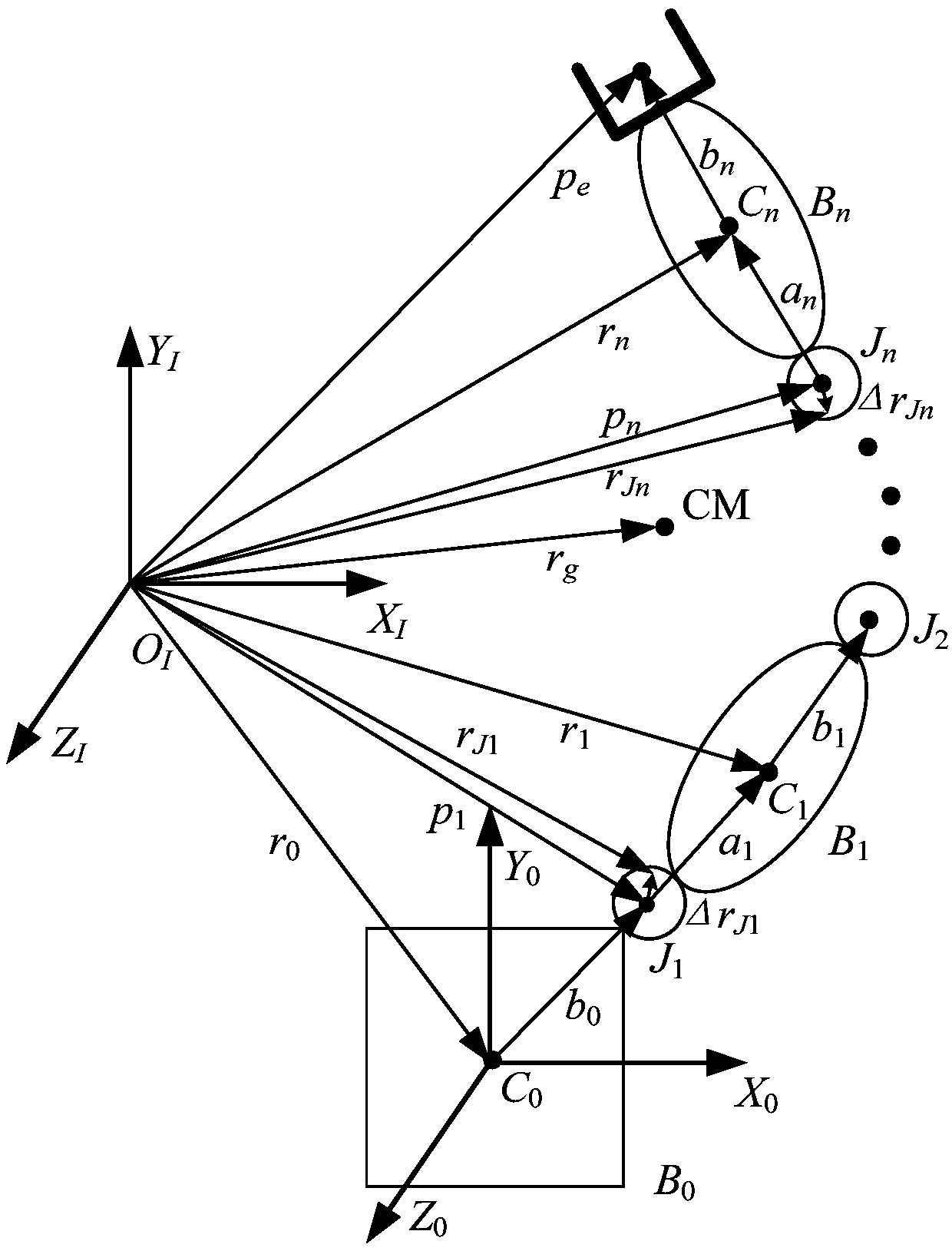
[0066] The invention can be applied to an aircraft carrying an n-degree-of-freedom mechanical arm in space ultra-short-distance operation tasks, and solves the problem of rapid control of its position and posture integration and stability. combine figure 1 , the center of mass of the vehicle is at C 0 , the n-degree-of-freedom manipulator passes through the first joint J 1 Installed on the outer surface of the aircraft, the installed position vector is b 0 . An n-degree-of-freedom manipulator has n rotational joints, J 1 ~ J n , every two revolving joints are connected by a rigid rod, revolving joint J n Via rigid bar B n Connect the end effector.
[0067] Below in conjunction with accompanying drawing, the present invention is described in further detail:
[0068] (1) Kinematics model
[0069] Firstly, define the inertial system and the aircraft system as O I x I Y I Z I and O 0 x 0 Y 0 Z 0 , as attached figure 1 As shown, the joint coordinate system is O k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More