

Robot patrolling fire extinguishment system based on ROS and control method for same
A technology of fire protection system and control method, applied in the field of robots, can solve the problems of inability to form active protection, property loss, insufficient sensitivity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
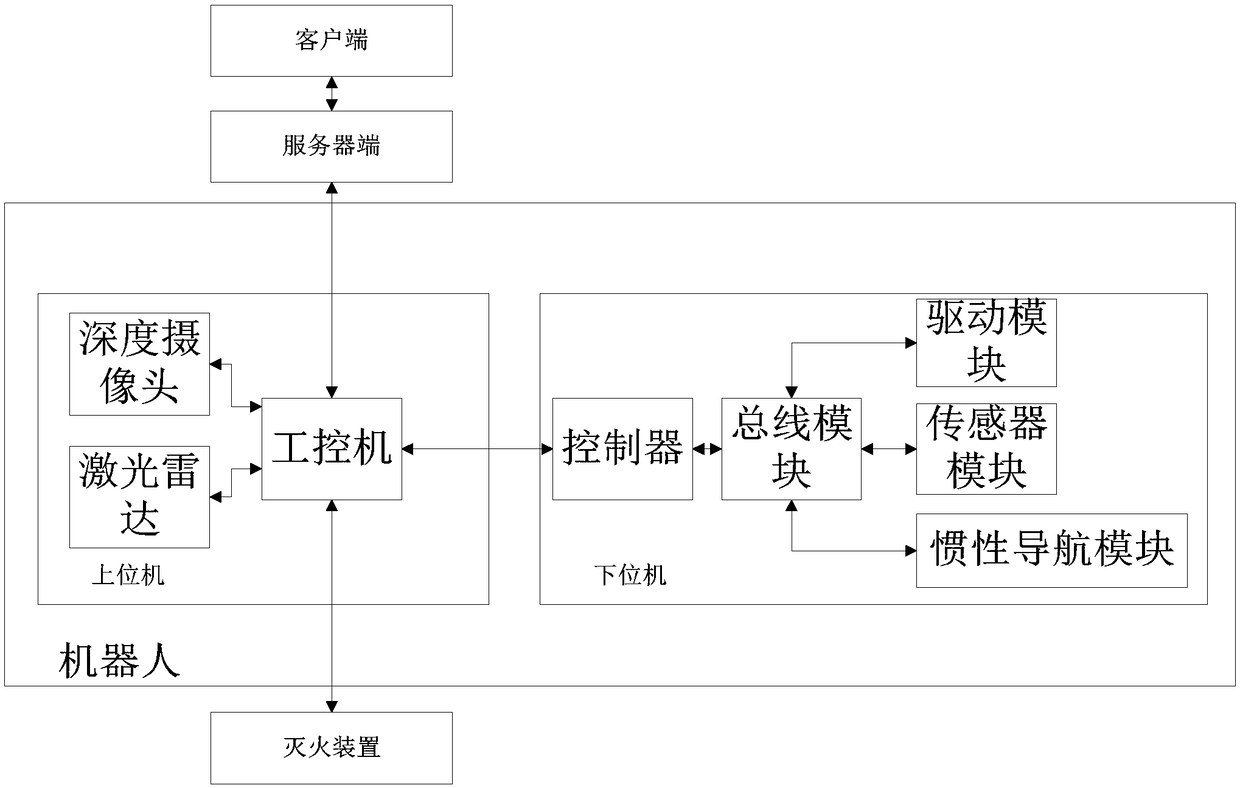
[0048] refer to figure 1 , a ROS-based robot patrol fire system, controlled by the client, including the robot and the server;
[0049] The robot includes a host computer and a lower computer; the upper computer includes an industrial computer, a depth camera and a laser radar, and the industrial computer is installed with a ROS system; the lower computer includes a controller, a bus module, a drive module, a sensor module and an inertial sensor. A navigation module, the sensor module includes a flame sensor and / or a temperature sensor, the controller is respectively connected to the drive module, the sensor module and the inertial navigation module through the bus module, and the controller is connected to the industrial computer;
[0050] The server end is connected with the industrial computer and the client respectively, and the ROS system is installed at the server end;
[0051] The server end is used to receive the navigation map uploaded by the client and send the navi...
Embodiment 2
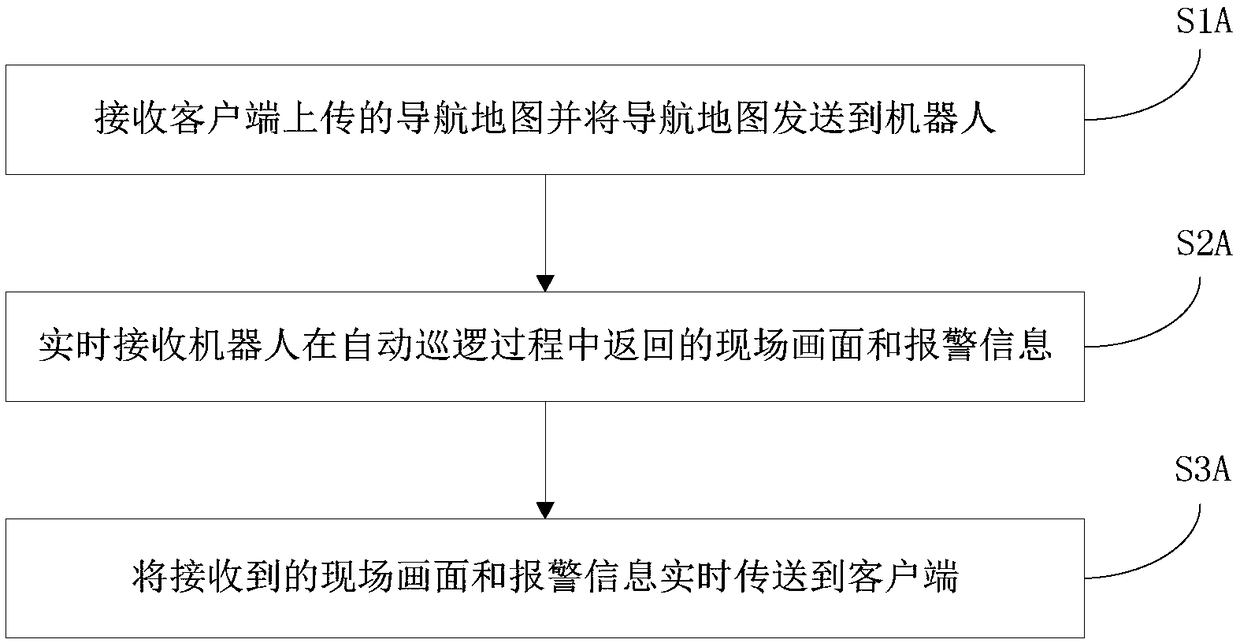
[0061] This embodiment is aimed at the server-side control method in the ROS-based robot patrol fire-fighting system in Embodiment 1, refer to figure 2 , including the following steps:
[0062] Receive the navigation map uploaded by the client and send the navigation map to the robot; multiple patrol points and corresponding patrol point orientations are preset on the navigation map, and the navigation map is used to guide the robot to perform automatic patrols;
[0063] Real-time reception of on-site images and alarm information returned by the robot during automatic patrol;
[0064] Transmit the received on-site pictures and alarm information to the client in real time.
[0065] In the robot application scene, you can use tools such as Plidar lidar to obtain laser ranging data, and then use the Gmapping algorithm in the RVIZ visualization software to process the laser ranging data, so as to obtain a two-dimensional grid grid map as a navigation map. A number of patrol poi...
Embodiment 3
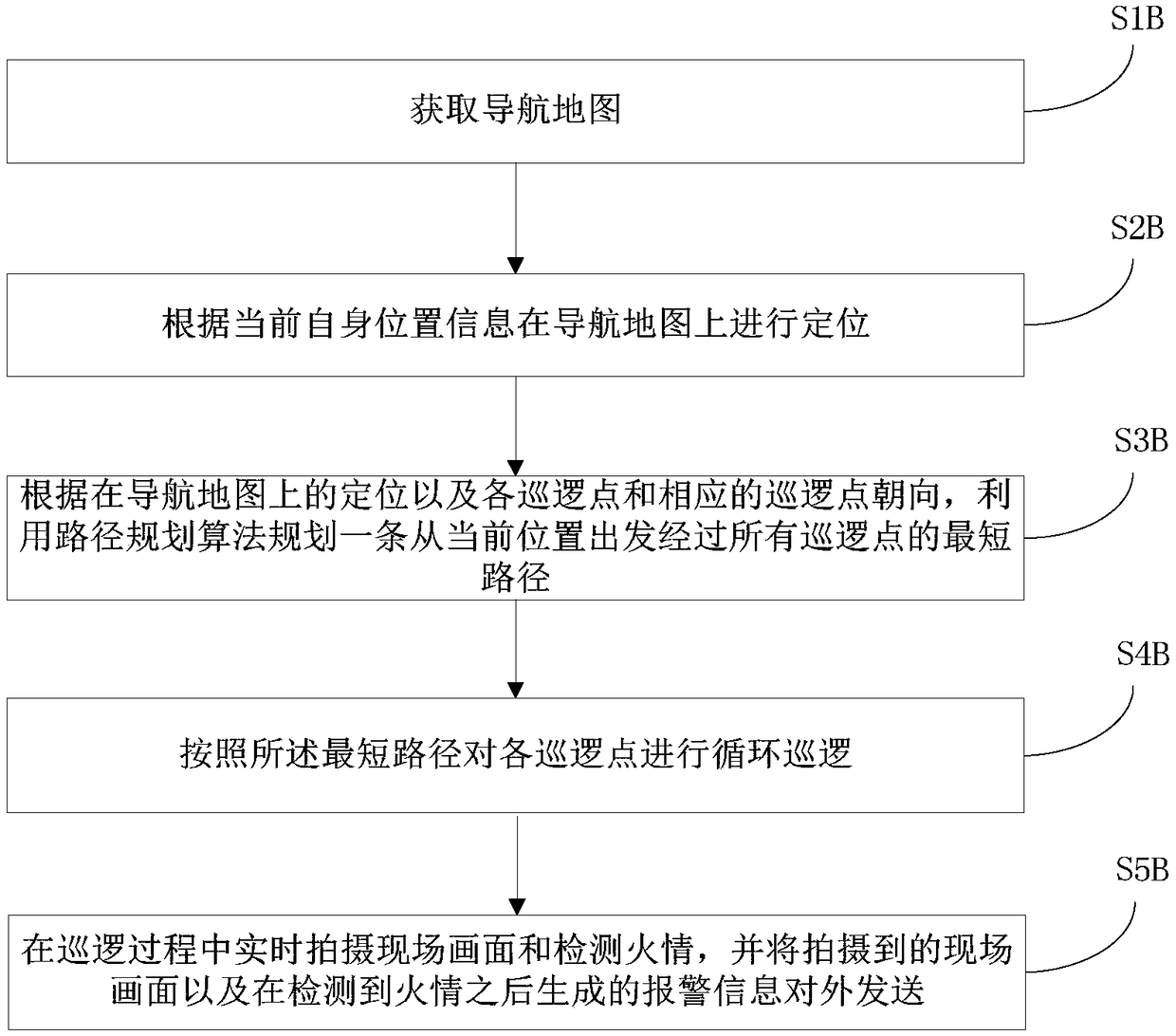
[0070] This embodiment is aimed at the control method of the robot in the ROS-based robot patrol fire-fighting system of Embodiment 1. The control method of the robot in this embodiment can be used in conjunction with the control method of the server side in Embodiment 2. Refer to image 3 , the method of this embodiment includes the following steps:
[0071] Obtaining a navigation map; multiple patrol points and corresponding patrol point orientations are preset on the navigation map;
[0072] Positioning on the navigation map according to the current own position information;
[0073] According to the positioning on the navigation map and the orientation of each patrol point and the corresponding patrol point, use the path planning algorithm to plan a shortest path starting from the current position and passing through all the patrol points;
[0074] Carry out circular patrol to each patrol point according to the shortest path;
[0075] During the patrol process, the on-si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More