

Fixed wing aircraft vision-auxiliary landing navigation method under low visibility
A low-visibility, navigation method technology, applied in directions such as navigation, navigation by speed/acceleration measurement, mapping and navigation, etc., which can solve the problem of being susceptible to reflections from surrounding terrain, GPS signals being susceptible to interference or shielding, and low ILS navigation accuracy. and other problems, to achieve the effect of significant perspective effect, low cost, and elimination of inertial accumulation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In the fixed-wing aircraft vision-assisted landing navigation method under low visibility of the present invention, mainly include the following aspects:
[0018] 1. Visual landing navigation method framework
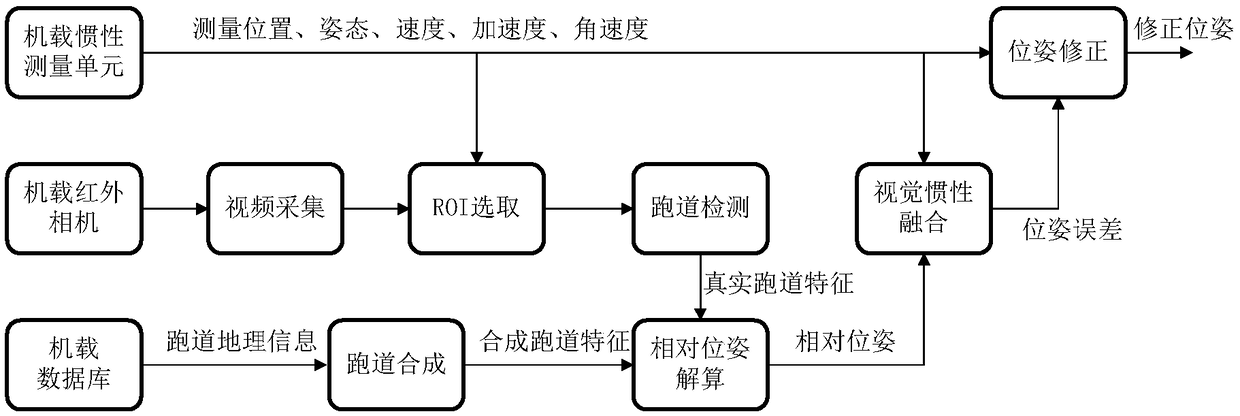
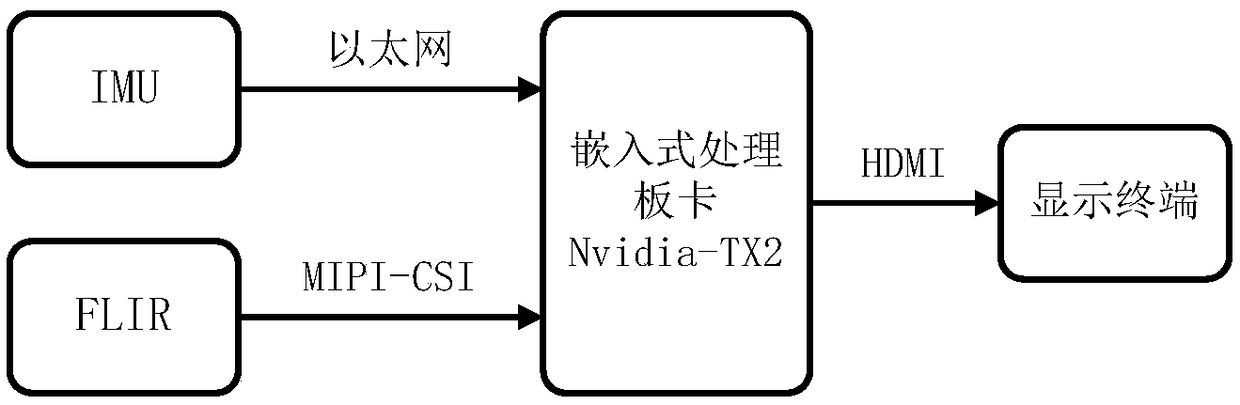
[0019] The input data of this method comes from the airborne inertial measurement unit (IMU), airborne forward-looking infrared camera (FLIR) and airborne navigation database, and the output data is the corrected position and attitude. The whole algorithm includes video acquisition, runway area Main parts such as selection (ROI), runway detection, runway synthesis, relative pose calculation, visual and inertial fusion, pose correction, etc., see the flow chart for details figure 1 . The specific information processing flow is as follows:
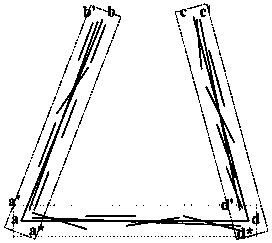
[0020] 1) Infrared video data stream: After the infrared video captured by FLIR is collected, the ROI is selected from the entire image by using the method assisted by inertial parameters, and then the image features of the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More