

Self-tuning method of speed loop control parameters based on fuzzy equivalent input disturbance method
A control parameter and self-tuning technology, applied in the field of servo motors, can solve problems such as instability, unstable speed loop control parameters, and failure to achieve self-tuning, and achieve the effects of reducing output deviation, improving tuning efficiency, and optimizing control effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
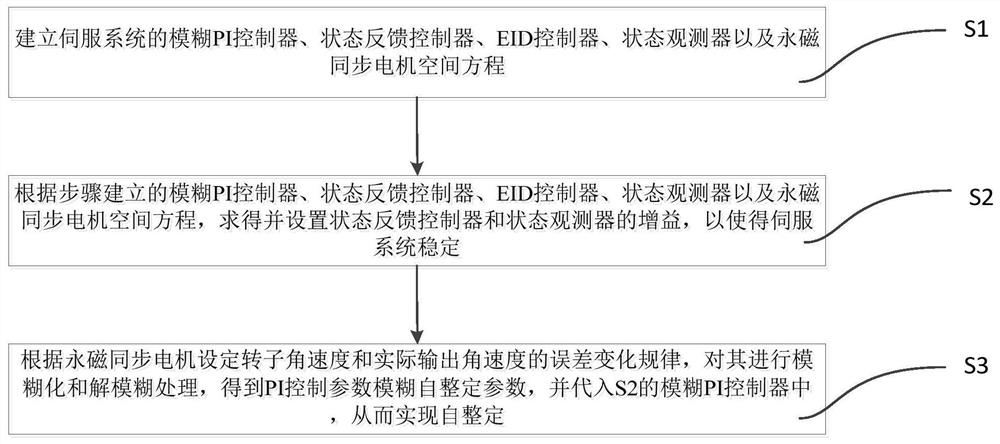
[0014] refer to figure 1 , which is a flow chart of an embodiment of the speed loop control parameter self-tuning method based on the fuzzy equivalent input disturbance method of the present invention. The self-tuning method of this embodiment includes the following steps.
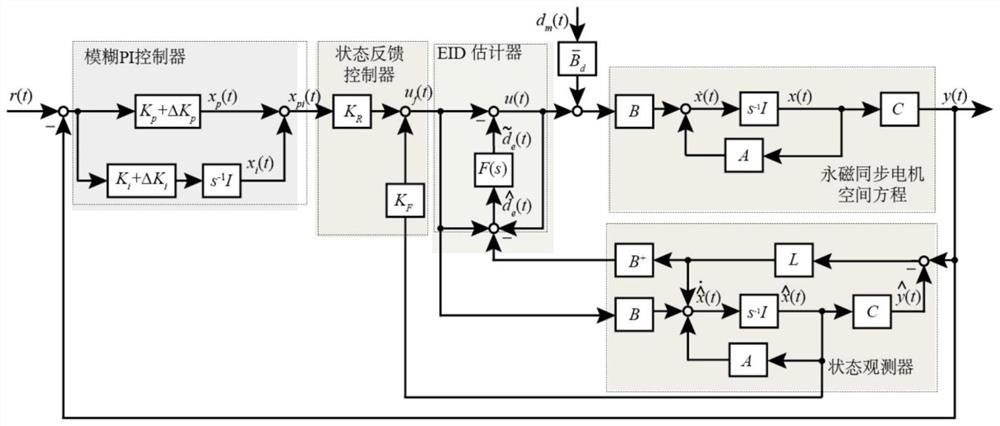
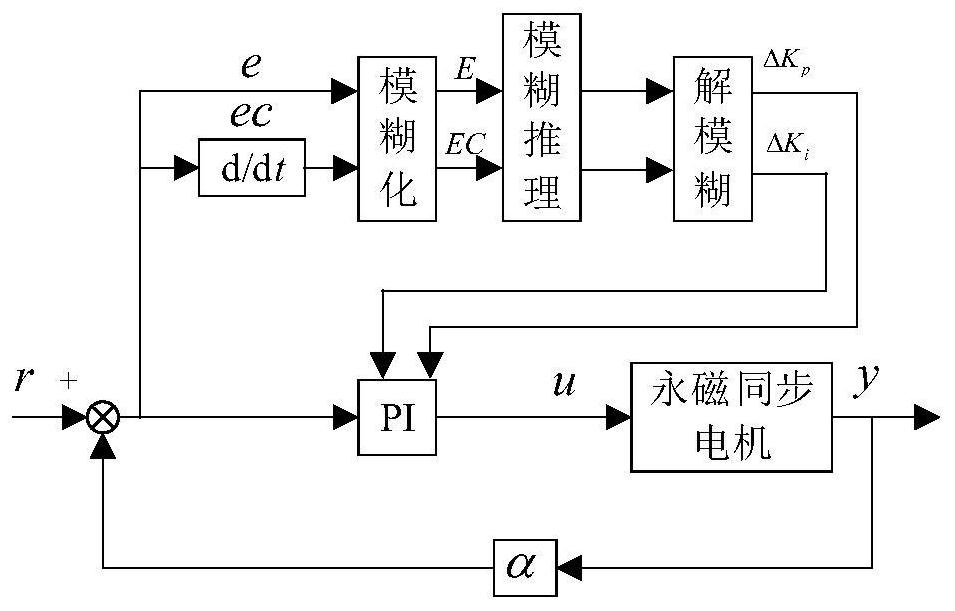
[0015] S1. Establish the fuzzy PI controller, state feedback controller, EID controller, state observer and permanent magnet synchronous motor space equation of the servo system.
[0016] The mechanical equation of the permanent magnet synchronous motor includes the moment of inertia, as shown in formula 1:
[0017]
[0018] (Formula 1: Permanent Magnet Synchronous Motor Mechanical Equation)
[0019] In the formula: J——moment of inertia; T e —...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More