

Artificial intelligence based gobang playing robot
An artificial intelligence and backgammon technology, applied in the field of intelligent robots, can solve the problems of low degree of intelligence, low operation accuracy, complex mechanical structure, etc., and achieve the best training effect, high recognition accuracy and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
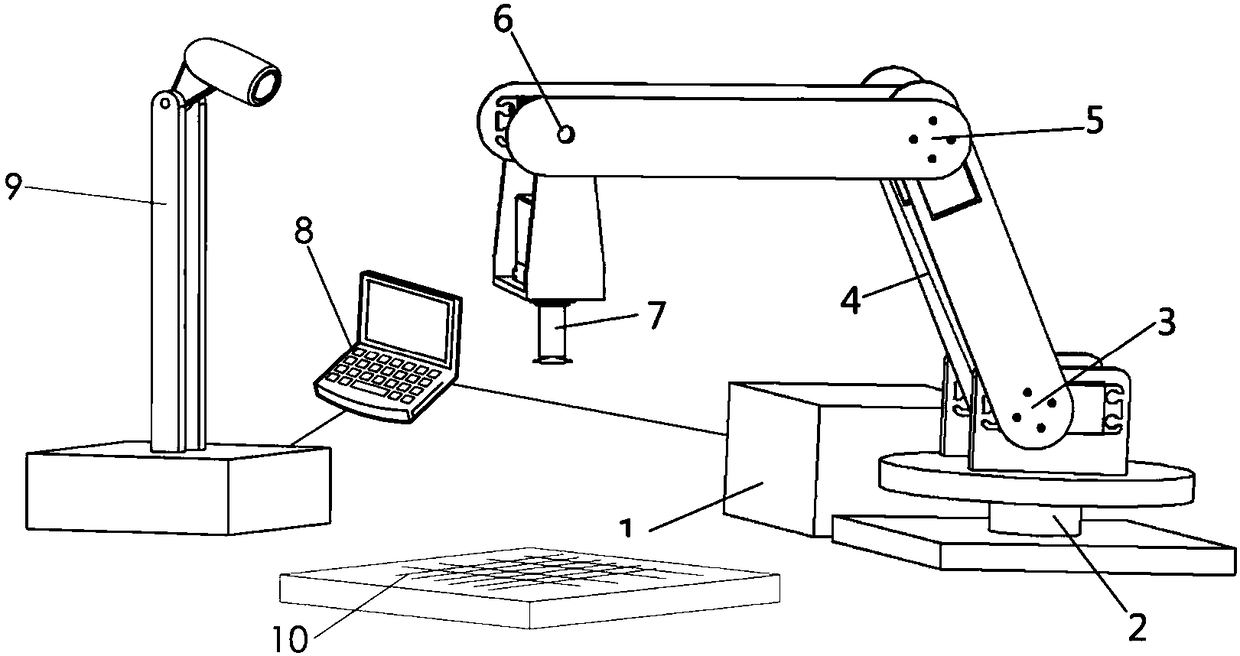
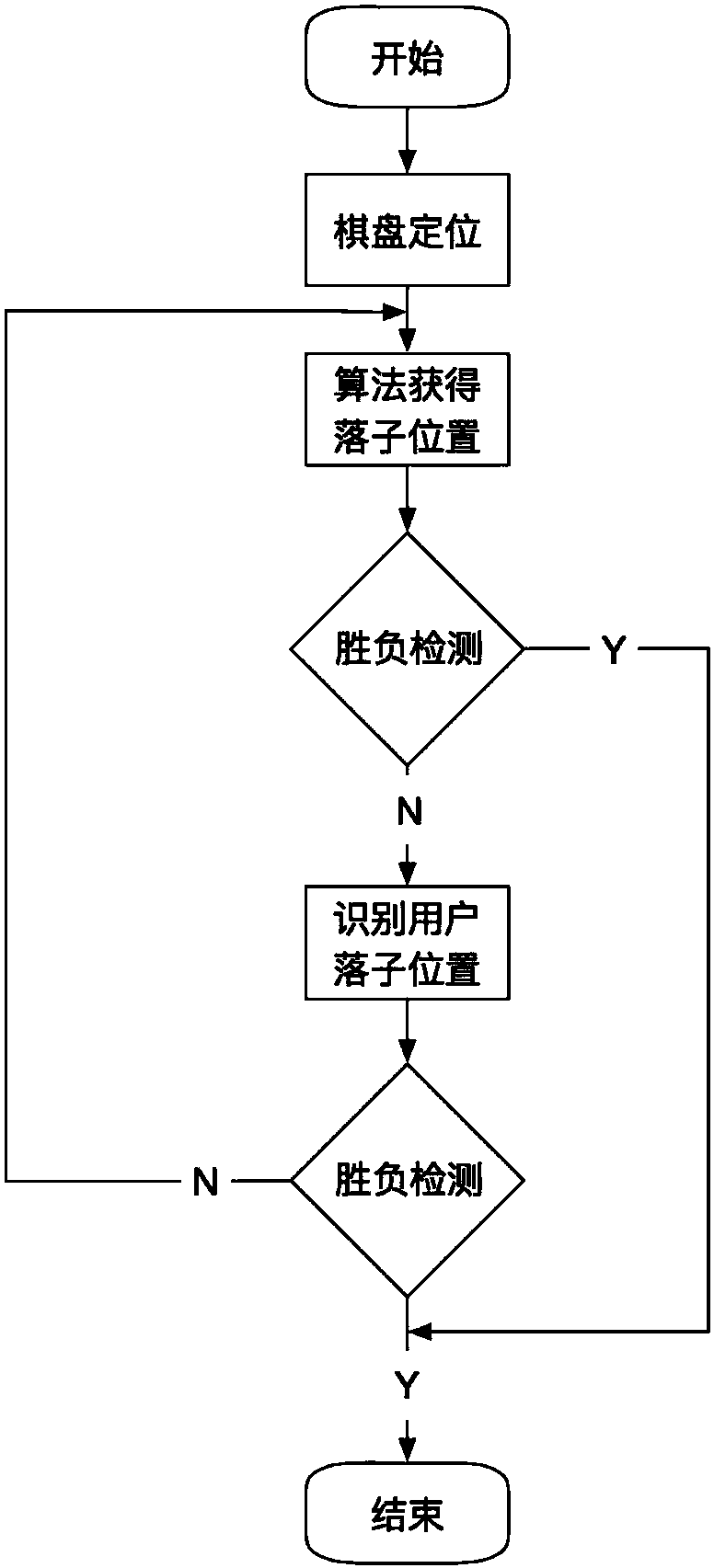
[0026] Embodiment: In the early stage, a model is trained using the neural network of machine learning to be used in backgammon games. After the chessboard is installed, set a camera directly above it and connect it with the host computer, place the manipulator and air pump on one side of the chessboard, connect the manipulator system with the host computer, and run the background program on the host computer. Play backgammon. After the user moves the chess piece, the upper computer detects the change of the chess game through the collected images and triggers the game action. The program rebuilds the chessboard according to the new situation, and then obtains the optimal chess position based on the model trained by machine learning, generates corresponding instructions, and then sends the instructions to the robotic arm. The robotic arm moves over the surface of the chess piece, the air pump is activated, and the suction cup picks up the chess piece. After the mechanical ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More