

Deepwater robot power supply system
A power supply system and robot technology, which is applied in the field of robots, can solve problems such as large redundancy, low efficiency, and start-up overcurrent, and achieve the effects of reducing start-up current, reducing the number of wires, and reducing large voltage drops
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
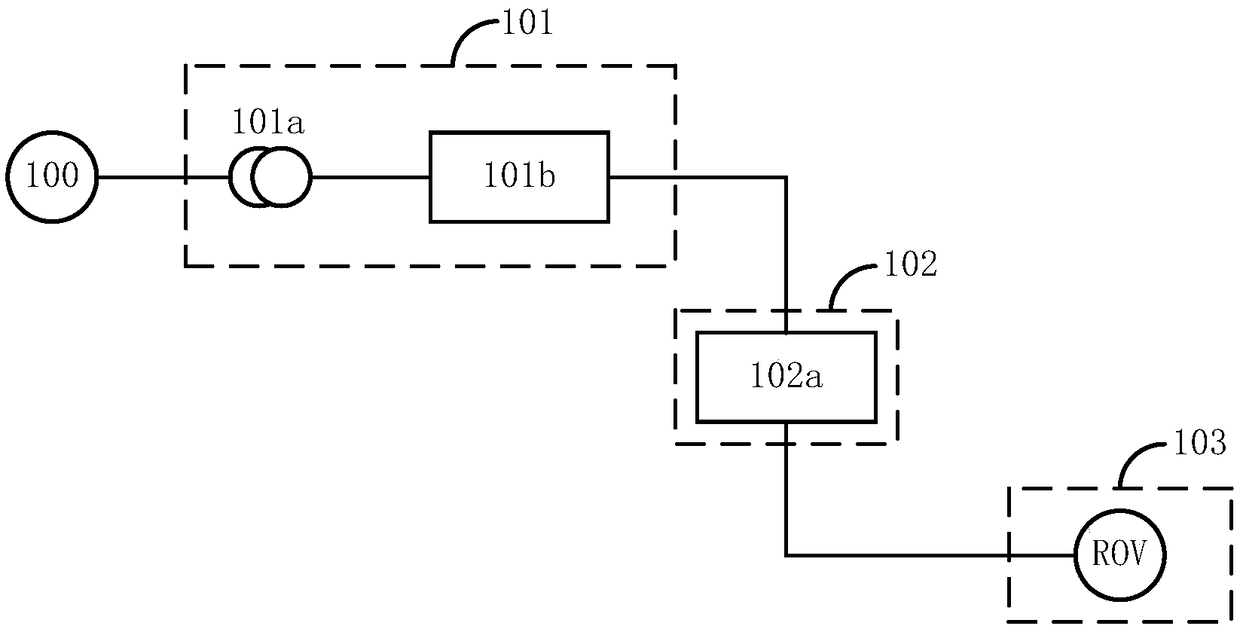
[0036] figure 1 A schematic structural diagram of the deep-sea robot power supply system provided by this embodiment is shown. In this embodiment, the deep-sea robot is preferably an unmanned remotely operated vehicle (ROV).
[0037] Such as figure 1 As shown, the deep-sea robot power supply system provided by this embodiment preferably includes: a surface power supply device 101 and an underwater repeater 102 . Wherein, the water surface power supply device 101 is arranged on the ship, and is connected to the onboard generator 100 on the ship, so that the low-voltage alternating current provided by the onboard generator 100 can be transmitted to the water surface power supply device 101 . Certainly, in other embodiments of the present invention, according to actual needs, the onboard generator 100 can also be used as a component of the surface power supply device 101 , and the present invention is not limited thereto.
[0038] In this embodiment, the surface power supply d...
Embodiment 2
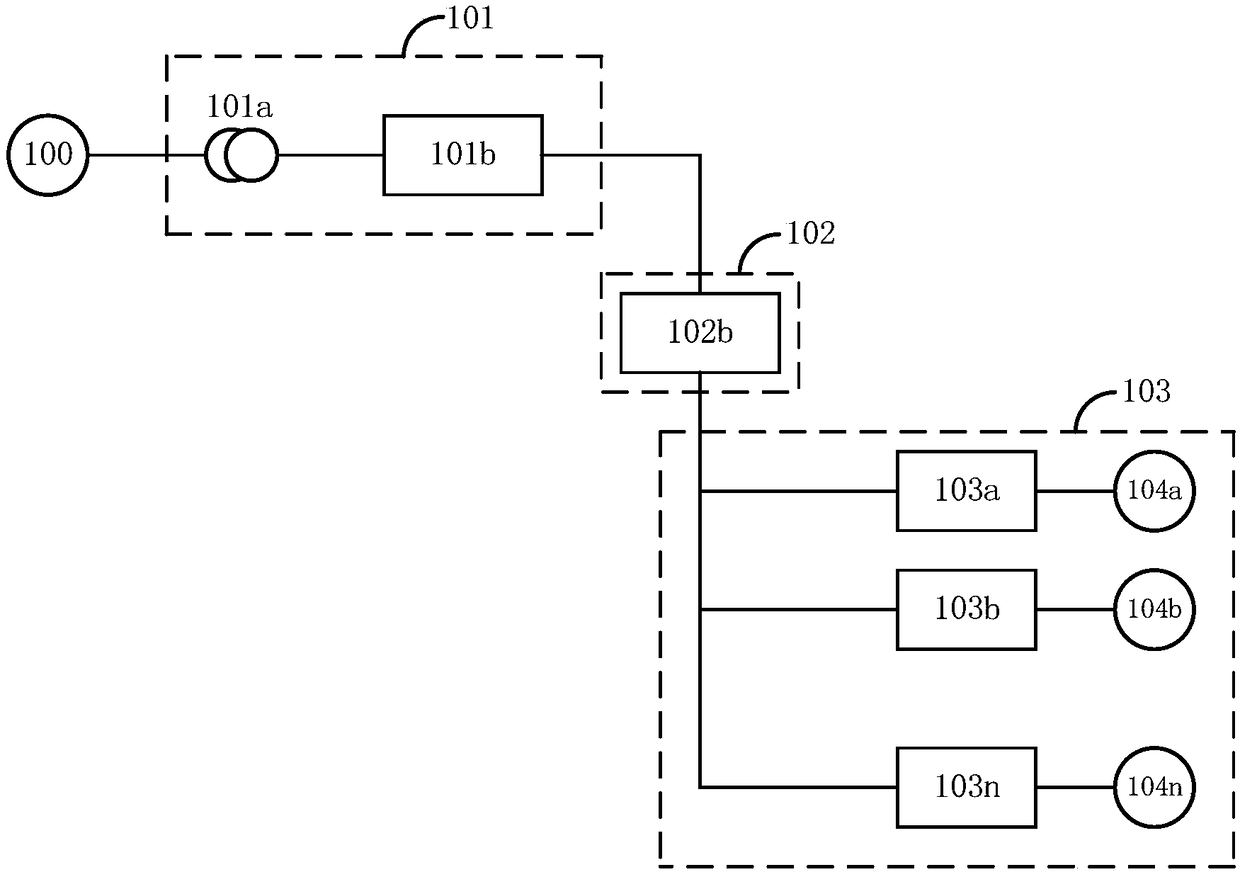
[0048] figure 2 A schematic structural diagram of the deep-sea robot power supply system provided by this embodiment is shown.
[0049] Such as figure 2 As shown, similar to the deep-sea robot power supply system provided in Embodiment 1, the deep-sea robot power supply system provided in this embodiment preferably also includes: a surface power supply device 101 and an underwater repeater 102 . Wherein, the structure of the water surface power supply device 101 and the principle of realizing its functions are the same as those described in the first embodiment above, so the relevant content of the water surface power supply device 101 will not be repeated here.
[0050] For some unmanned remotely controlled submersibles (ROVs), the interior is equipped with an underwater inverter circuit connected to the motor. Such as figure 2 As shown, the unmanned remote control vehicle ROV includes a plurality of motors (such as the first motor 104a, the second motor 104b, ..., the ...
Embodiment 3
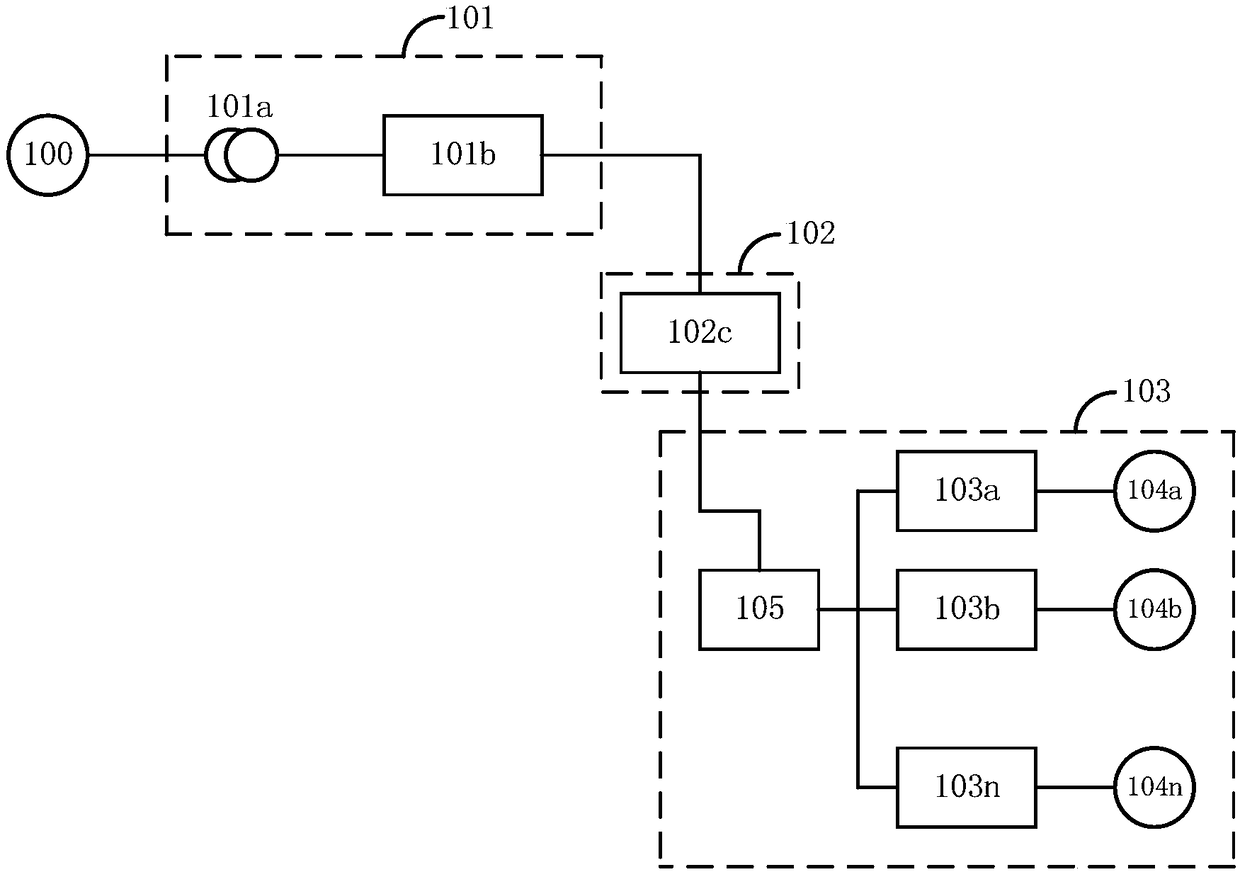
[0054] image 3 A schematic structural diagram of the deep-sea robot power supply system provided by this embodiment is shown.
[0055] In this embodiment, the deep-sea robot is preferably an autonomous underwater vehicle (Autonomous Underwater Vehicle, AUV for short). Autonomous underwater vehicles are usually cable-free underwater robots, which can have the advantages of large range of activities, good maneuverability, safety, and intelligence. For this type of underwater robot, similar to the deep-sea robot power supply system provided in Embodiment 1, the deep-sea robot power supply system provided in this embodiment preferably also includes: a surface power supply device 101 and an underwater repeater 102 . Wherein, the structure of the water surface power supply device 101 and the principle of realizing its functions are the same as those described in the first embodiment above, so the relevant content of the water surface power supply device 101 will not be repeated he...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More