A vehicle front obstacle detection method based on YOLO
An obstacle detection and vehicle technology, applied in the field of obstacle detection in front of a vehicle, can solve the problems of slow detection speed and low detection accuracy, and achieve the effects of fast detection speed, high detection accuracy and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
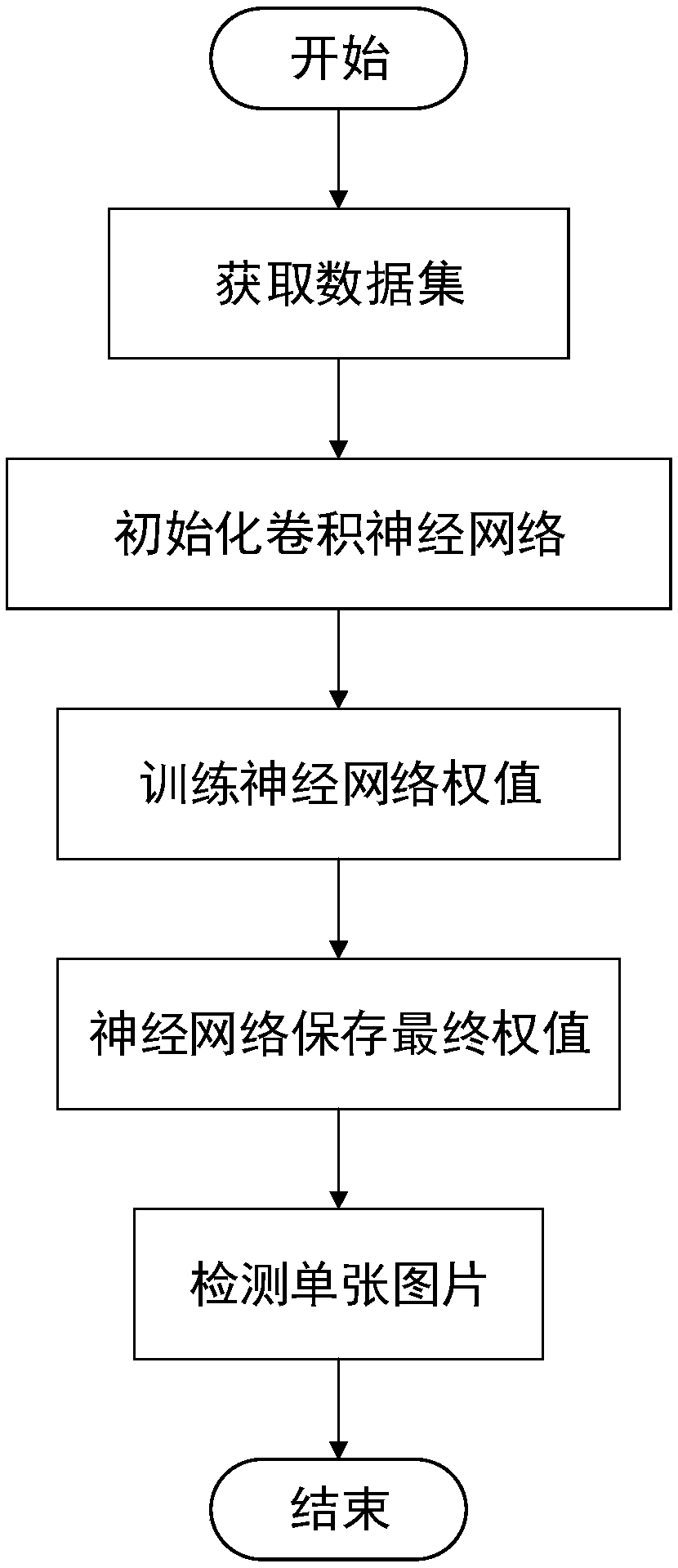
[0021] Specific implementation mode one: combine figure 1 Describe this embodiment, this embodiment is based on the specific process of the obstacle detection method in front of the vehicle based on YOLO:
[0022] Step 1. Obtain a data set. The data set is divided into a training set and a test set. Use a label box to mark each target in the training set image, and obtain the position information and category information of each target in the training set image;
[0023] Step 2. Initialize the convolutional neural network, and input the training set with the marked box into the convolutional neural network;
[0024] Step 3, preprocessing the training set images;
[0025] Step 4, dividing the preprocessed training set images into grids;
[0026] The grid divided into YOLO is responsible for the task of detecting target objects;
[0027] Step 5, the grid selects the initial candidate frame;
[0028] Randomly generate two initial candidate boxes for each grid, or define its i...
specific Embodiment approach 2
[0033] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the data set is obtained in the step 1, the data set is divided into a training set and a test set, and each target in the training set image is marked with a label frame to obtain the training Collect the position information and category information of each target in the image; the specific process is:
[0034] Step 11, intercept 10,000 images from the driving recorder as a data set, 8,000 images in the data set are used as a training set, and the remaining 2,000 images are used as a test set;
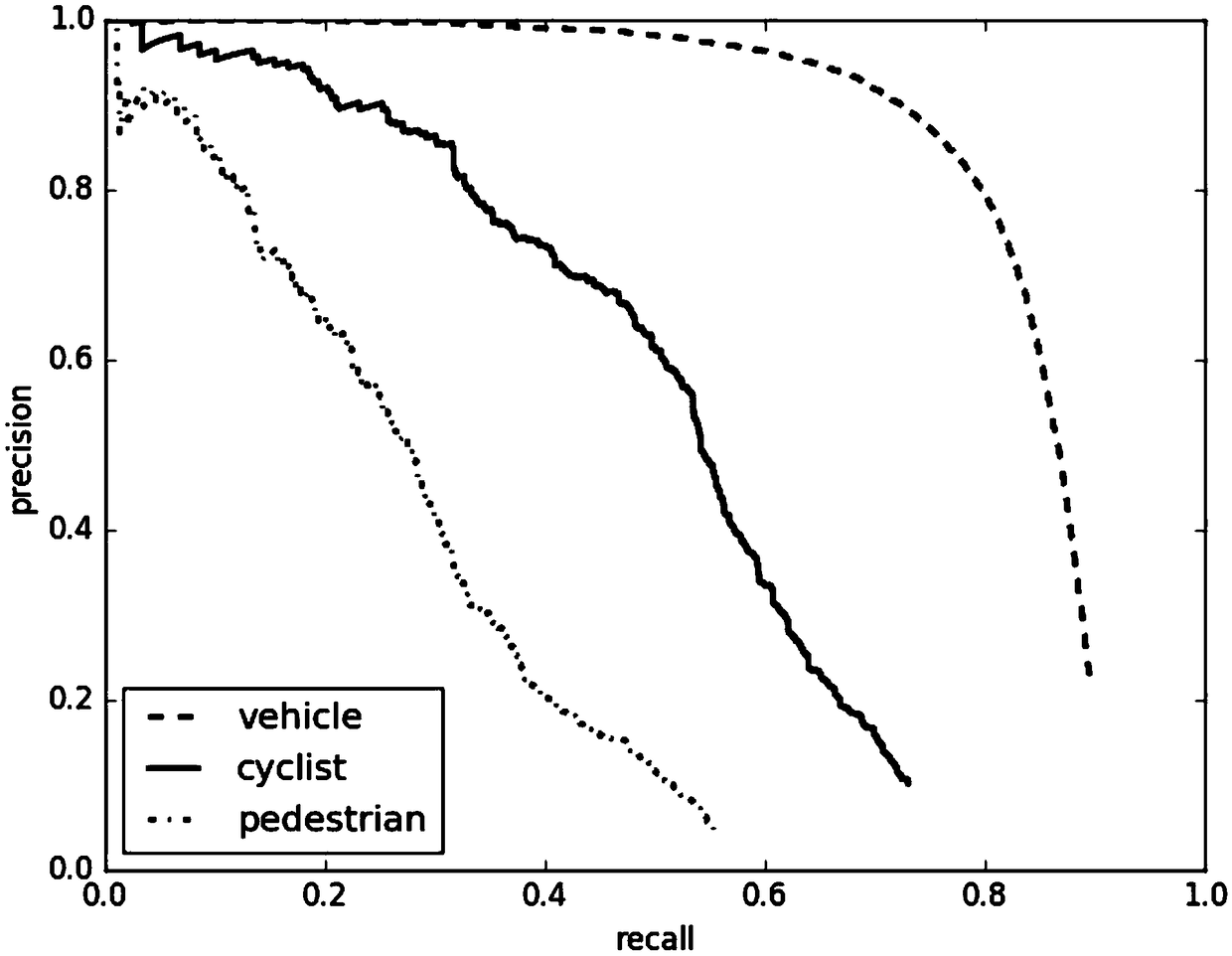
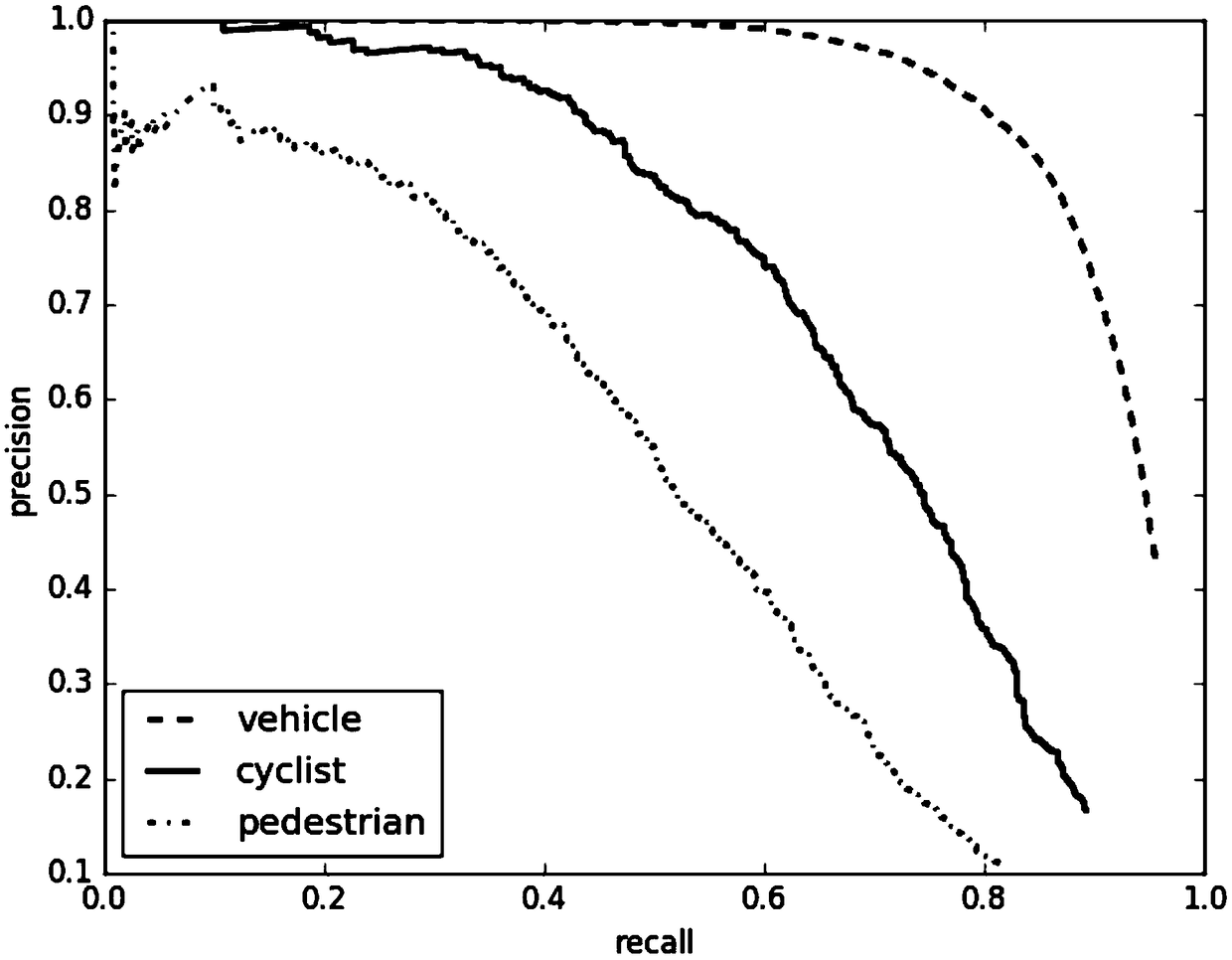
[0035] The images in the data set are the road conditions in front of the driver, and the images include three types of targets: pedestrians, cyclists and cars;
[0036] Step 12, use the label frame to mark each target (pedestrian, cyclist or car) in the training set image, and obtain the position information and category information of each target in the training set image;
[003...
specific Embodiment approach 3
[0040] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the convolutional neural network is initialized in the step 2; the specific process is:
[0041] The YOLO detection network includes 24 convolutional layers and 2 fully connected layers (24 convolutional layers followed by 2 fully connected layers);
[0042] Among them, the convolutional layer is used to extract image features, and the fully connected layer is used to predict the image position and category probability value;
[0043] Convolutional neural network parameters include impulse Momentum, weight decay Decay, maximum number of iterations Maxbatches, learning rate Learning rate, learning rate change iterations Steps, and learning rate change ratio Scales.
[0044] Define the training parameters in the convolutional neural network as shown in Table 1;
[0045] Table 1 Network configuration parameters
[0046] Momentum
[0047] Other steps and parameters are the same as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com