

A teleoperation robot system and method driven by mixed bioelectrical signals
A technology for teleoperating robots and bioelectric signals, which is applied in the fields of instruments, mechanical mode conversion, computer parts, etc., can solve the problems of poor man-machine efficiency and difficulty in satisfying operators, and achieves reducing complexity and improving remote operation control accuracy. , the effect of a good operating environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
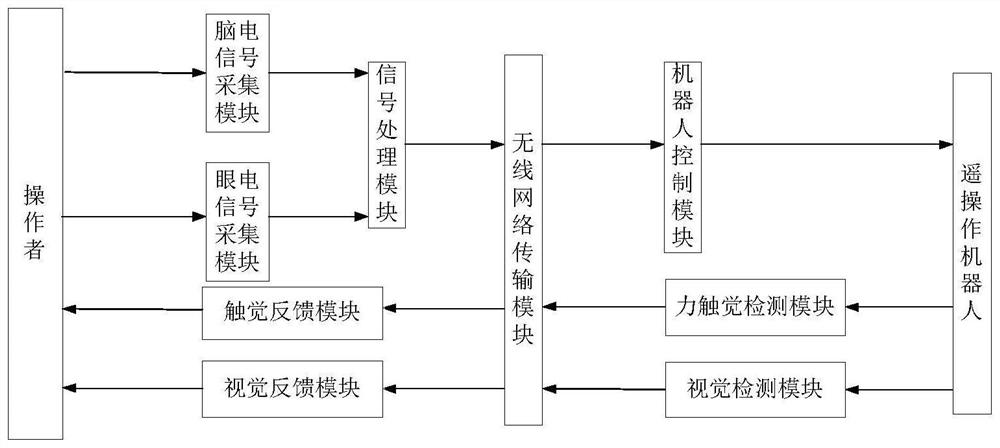
[0038] figure 1 This is the system structure diagram of the present invention, a teleoperation robot system driven by mixed bioelectrical signals, including an EEG signal acquisition module, an EEG signal acquisition module, a signal processing module, a wireless network transmission module, a robot control module, a force touch detection module, visual detection module, haptic feedback module and visual feedback module; wherein,
[0039] The EEG signal acquisition module is used to collect the EEG signal of the sensory motor area of the brain through the EEG cap and output the EEG signal to the signal processing module;
[0040] The eye electrical signal acquisition module is used to collect the eye electrical signal when the operator blink...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More