

Joint estimation method of signal carrier frequency and two-dimensional DOA based on undersampling
A joint estimation and undersampling technology, applied in the field of signal processing, can solve the problems of information redundancy and high sampling rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
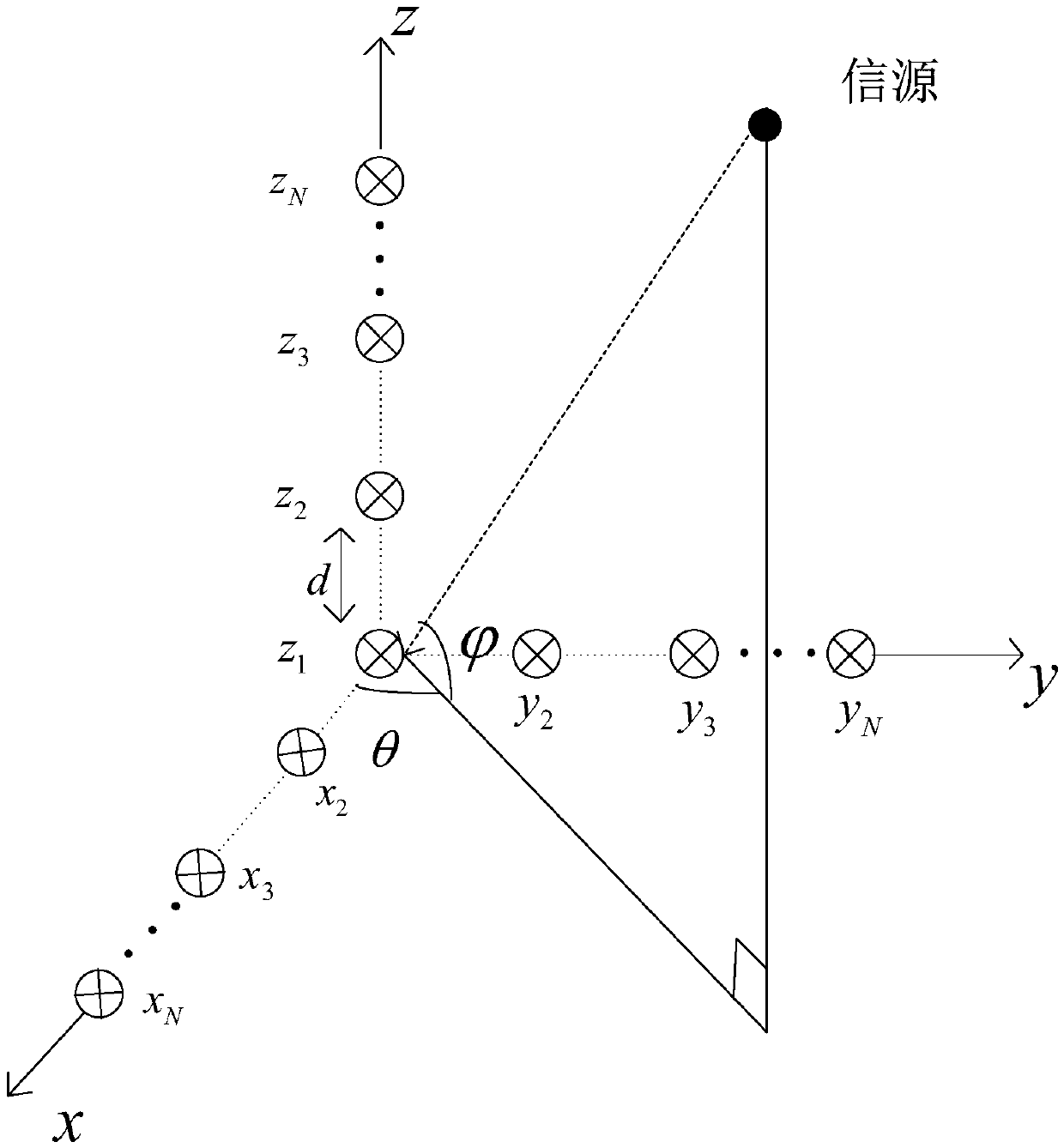
[0064] A double-L-shaped array for joint estimation of signal carrier frequency and two-dimensional DOA for under-sampling. The structure of the double-L-shaped array is as follows figure 1 As shown, it consists of three uniform linear arrays orthogonal to each other, and there are N array elements in the x-axis, y-axis and z-axis; the distance between two adjacent sensors where c is the speed of light, f Nyq is the Nyquist frequency, θ is the azimuth angle of the source;
[0065] Each sensor is connected to a modulated broadband converter channel, and the signal received by the sensor is first compared with the period T p =1 / f p The pseudo-random sequence p(t) is mixed, and then the cut-off frequency is f s / 2 low-pass filter with f s The frequency of low-speed sampling; where f p is the frequency of the pseudo-random sequence, and f is selected for the convenience of calculation s = f p .
specific Embodiment approach 2
[0066] A method for jointly estimating signal carrier frequency and two-dimensional DOA based on undersampling is realized based on the double L-shaped array of the first embodiment. There are M uncorrelated sources sending out a narrowband signal s i (t) is incident to the double L-shaped array, i∈{1,2,...M}; let the carrier frequency of the i-th narrowband signal be f i , the azimuth is θ i , the pitch angle is θ i ∈[0,π], The angle with the x-axis is α i , the angle with the y-axis is β i , the angle with the z axis is γ i .
[0067] A method for jointly estimating signal carrier frequency and two-dimensional DOA based on undersampling, comprising the following steps:
[0068] The dual L-shaped array sensor is used to collect signals, and the undersampling value of the three-axis array is obtained by modulating the broadband converter, and then the rotation invariant subspace algorithm is used to perform singular value decomposition on the obtained sampling value ...
specific Embodiment approach 3
[0069] due to source s i (t) satisfies the narrowband assumption, there is s i (t+τ n )≈s i (t). The x-axis sensor receives the signal as
[0070]
[0071] in Indicates the phase difference between the signal received by the nth sensor and the first sensor.
[0072] The Fourier form of the output signal after mixing and filtering is
[0073]
[0074] where f is the frequency; is the Fourier series coefficient of the mixing sequence.
[0075] The discrete Fourier form of the sequence obtained after sampling can be expressed as
[0076]
[0077] definition but DTFT {} stands for discrete-time Fourier transform. w i The vector formed by [k] is w[k].
[0078] For the x-axis, the above formula can be written in the following matrix form:
[0079] X(f)=A x W(f)
[0080] Among them, X(f) is an N×1 matrix, and the nth element is The unknown vector W(f) is an M×1 matrix, and the i-th element is
[0081] Similarly, for the y-axis and z-axis, there are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More