

Optimization method for multi-motor cooperative control PID parameters based on clone immune algorithm and particle swarm algorithm
A particle swarm algorithm and collaborative control technology, applied in electric controllers, controllers with specific characteristics, calculations, etc., can solve problems that are not the global optimal solution, the algorithm falls into a local optimal state, and needs to be improved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0049]The technical scheme that the present invention solves the problems of the technologies described above is:
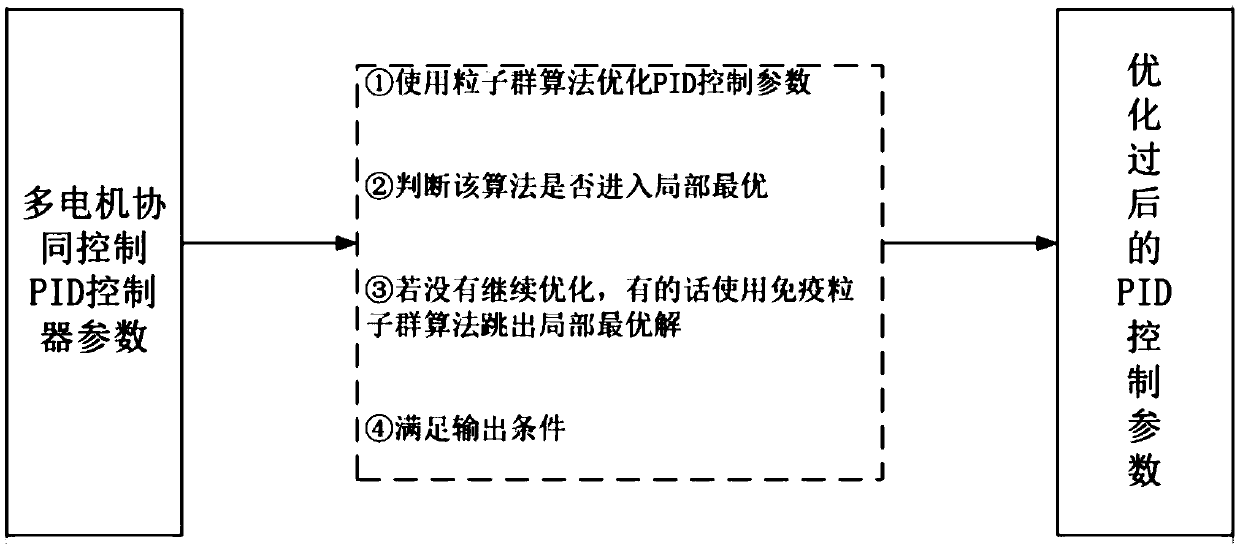
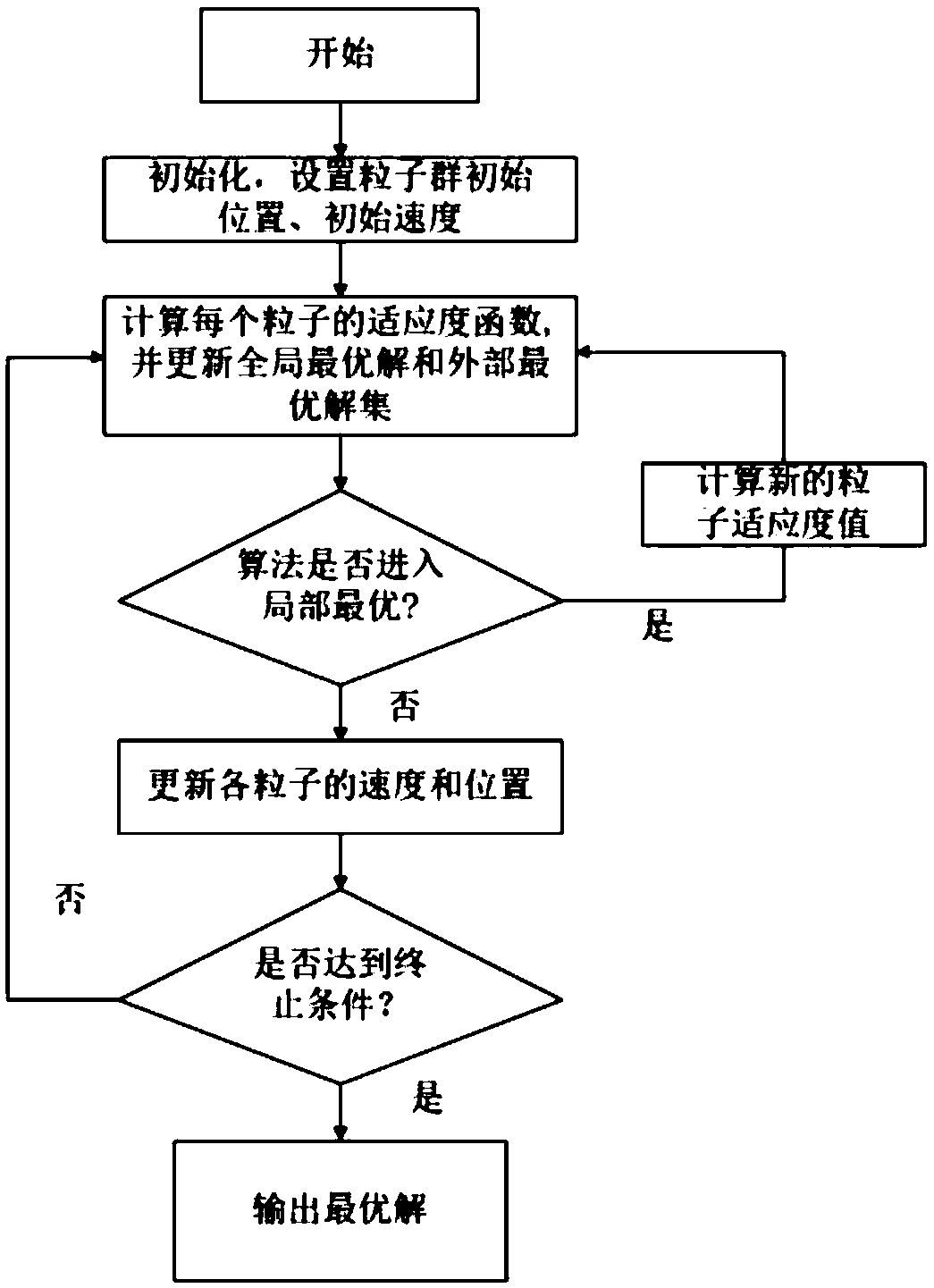
[0050] The purpose of the present invention is to optimize the PID parameters of the multi-motor system control system by using the modified particle swarm algorithm—cloning immune particle swarm algorithm, because there are defects when using the particle swarm algorithm to optimize the PID parameters, it will fall into a local optimal situation, The optimized parameters are not the global optimal solution. However, the present invention optimizes the PID control parameters in the multi-motor cooperative control system by cloning the immune particle swarm algorithm, and realizes high-precis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More