

Calibration method of ophthalmic microsurgery auxiliary robot
A technique for microsurgery, calibration methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
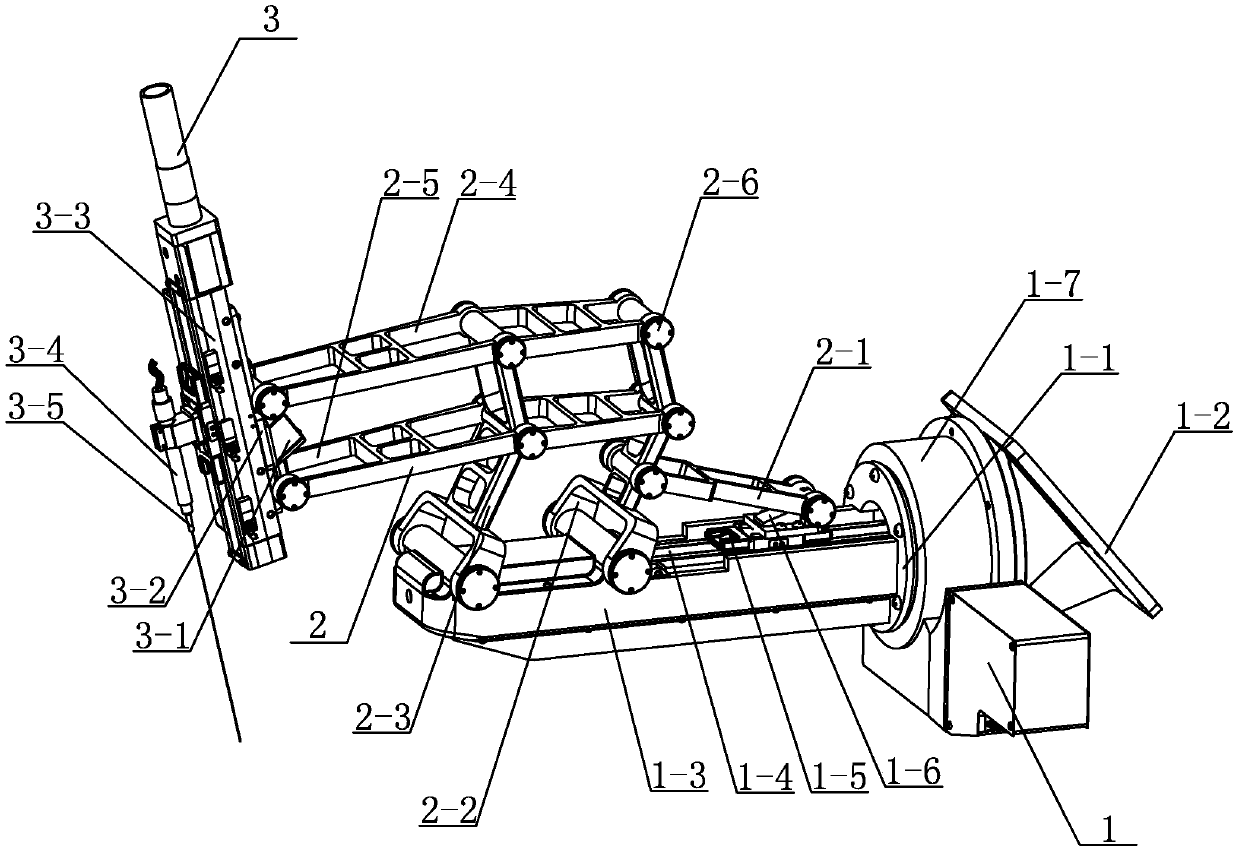
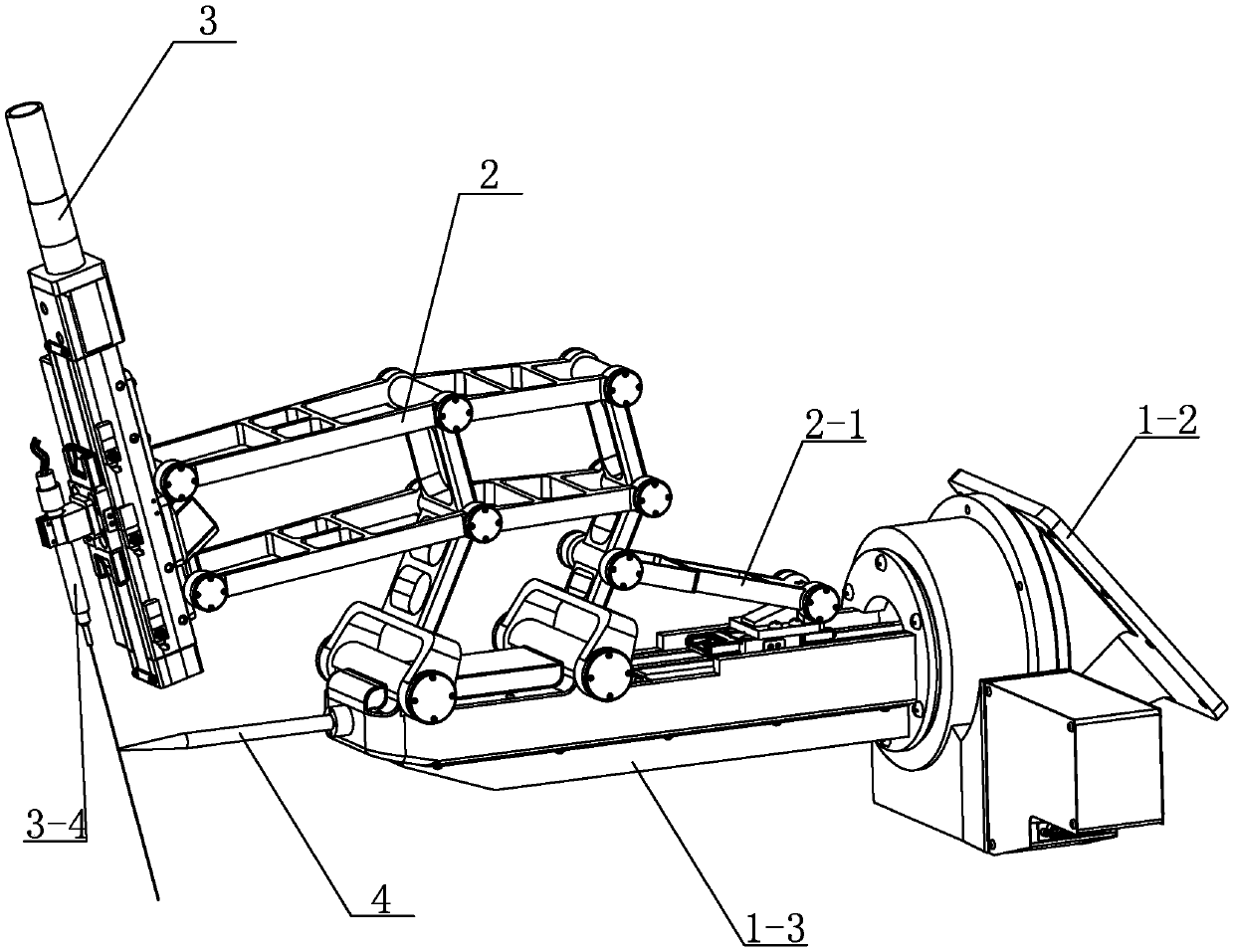
[0026] Specific implementation mode one: combine Figure 1 to Figure 2 Describe this embodiment, in order to more clearly show how the RCM point calibration method of the present invention is realized, the specific structure of the ophthalmic microsurgery auxiliary robot actuator that the present invention adopts when calibrating is disclosed as follows:
[0027] An executive mechanism of an ophthalmic microsurgery auxiliary robot in this embodiment includes a cantilever rotation module 1; it also includes a link assembly 2 and an end effector assembly 3, and the cantilever rotation module 1 includes a rotation module 1-1, Seat 1-2, cantilever 1-3, cantilever linear guide module 1-4, cantilever slider 1-5, cantilever slider connector 1-6 and rotating module shell 1-7, one end of cantilever base 1-2 is connected with The external mobile device is connected, the other end of the cantilever base 1-2 is connected to the rotating module 1-1, the cantilever 1-3 is connected to the r...
specific Embodiment approach 2
[0035] Specific implementation mode two: combination figure 1 Describe this embodiment, the rotating module 1-1 of this embodiment comprises motor, transmission device, worm and worm wheel, the output end of motor is connected with transmission device, the output end of transmission device is connected with worm wheel, and worm screw is installed on the cantilever 1-3 Inside, and the worm meshes with the worm gear. Such arrangement drives the rotation of the entire cantilever 1-3 around the cantilever axis; the connection method is simple and reliable, and other components and connection relations are the same as those in the first embodiment.
specific Embodiment approach 3
[0036] Specific implementation mode three: combination figure 1 This embodiment will be described. The cantilever linear guide module 1-4 of this embodiment adopts the XYZ Cartesian coordinate system of the KK60-10P-300A-F2ES2 (PNP) model. With such arrangement, the stroke is large, the production is convenient, and the cost is low. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More