

Tool edge sharpening method for six-axis mechanical arm with force control function based on machine vision
A six-axis robotic arm and machine vision technology, which is used in grinding machine parts, manufacturing tools, grinding automatic control devices, etc., can solve the problems of inability to achieve stable cutting, high cost, and expensive offline programming software. Achieving stable and good cutting results and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0034] The tool cutting method based on machine vision and six-axis mechanical arm with force control function of the present invention needs to be applied to build the following hardware environment: 3D vision system, camera bracket, calibration auxiliary tool, image processor, six-axis mechanical arm with force control function Axis robot and required tools.
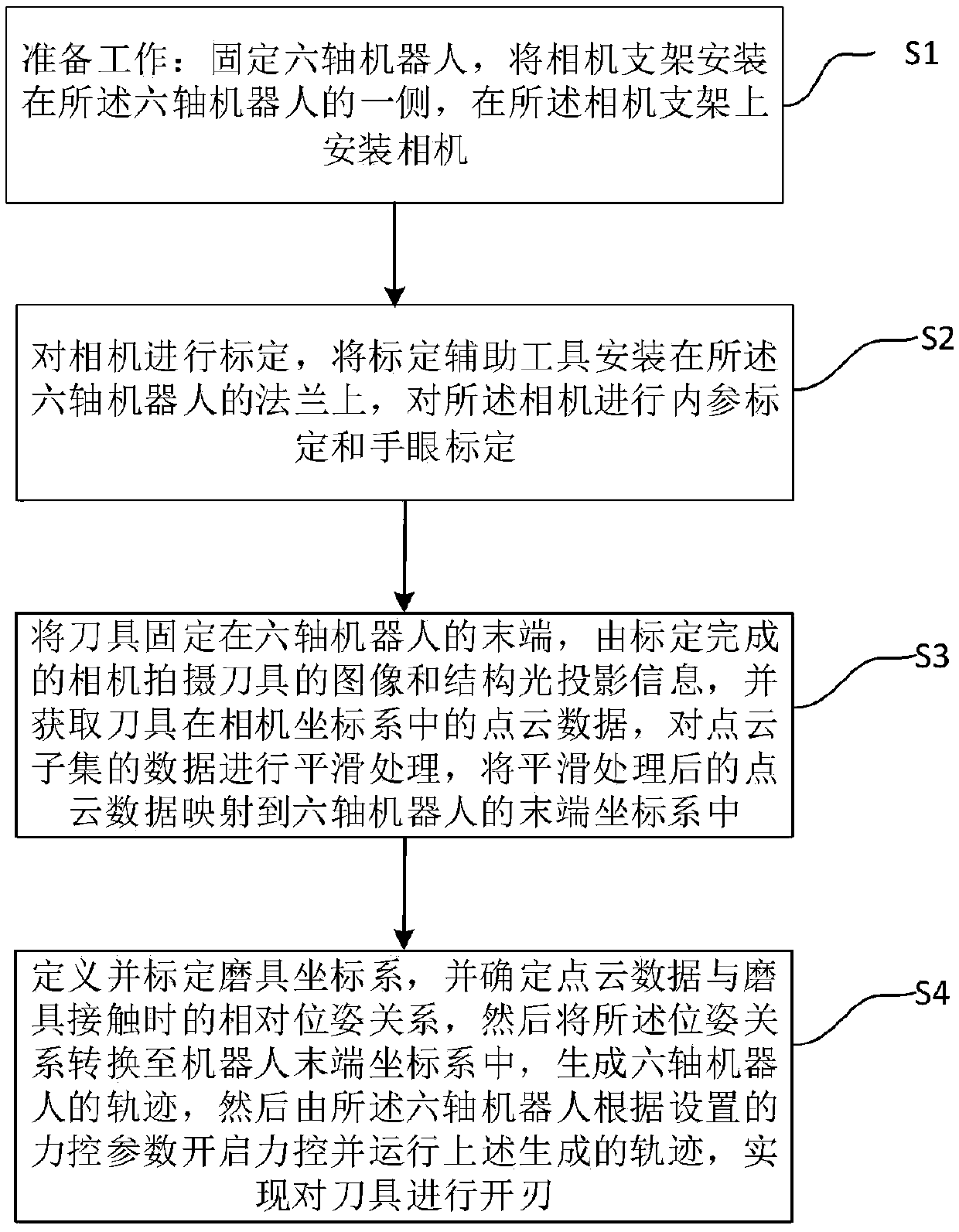
[0035] like figure 1 As shown, the tool sharpening method based on machine vision and a six-axis robotic arm with force control function in the embodiment of the present...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More