

Multi-degree-of-freedom multi-scale soft body grabbing device
A grasping device and multi-scale technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of difficult control of grasping force, variable size, and difficult sensor control of fragile items, so as to improve the grasping range and Adaptability, simple and compact structure, easy transmission control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
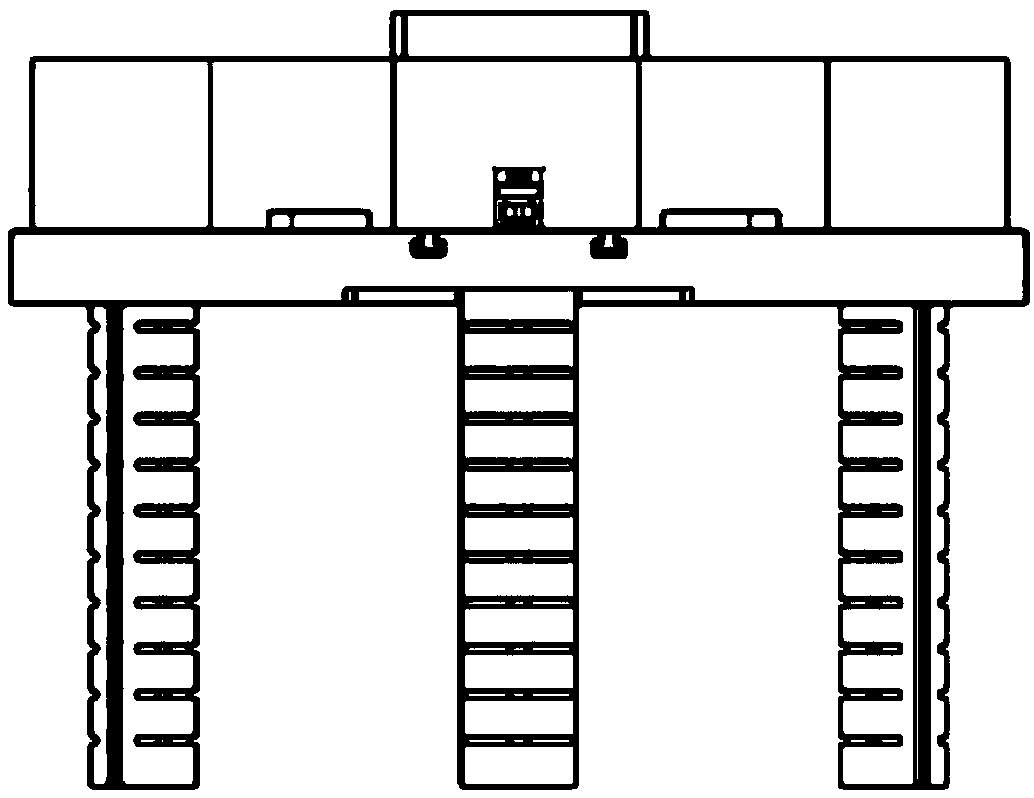
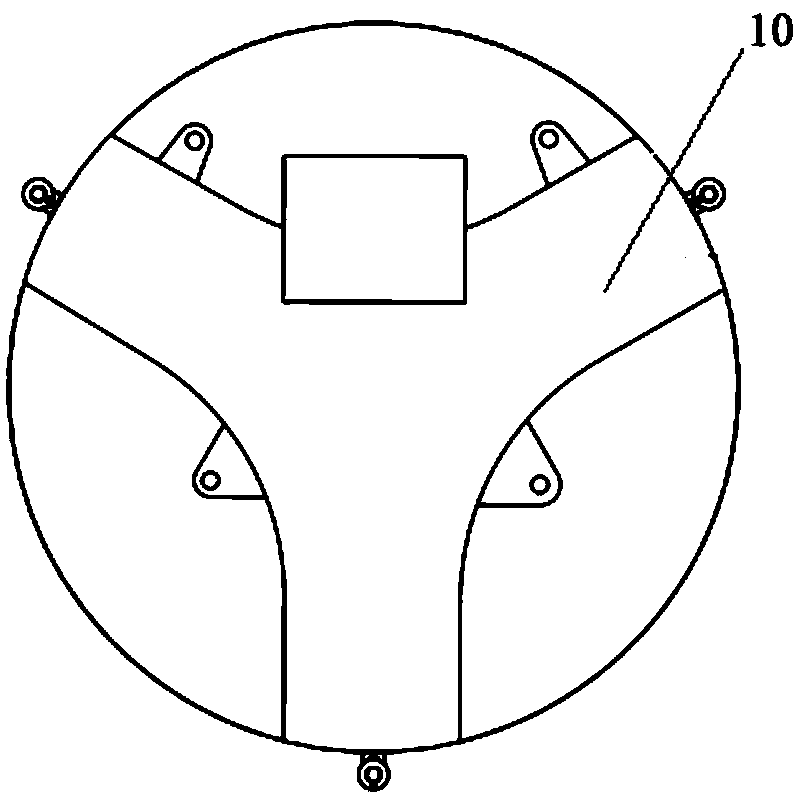
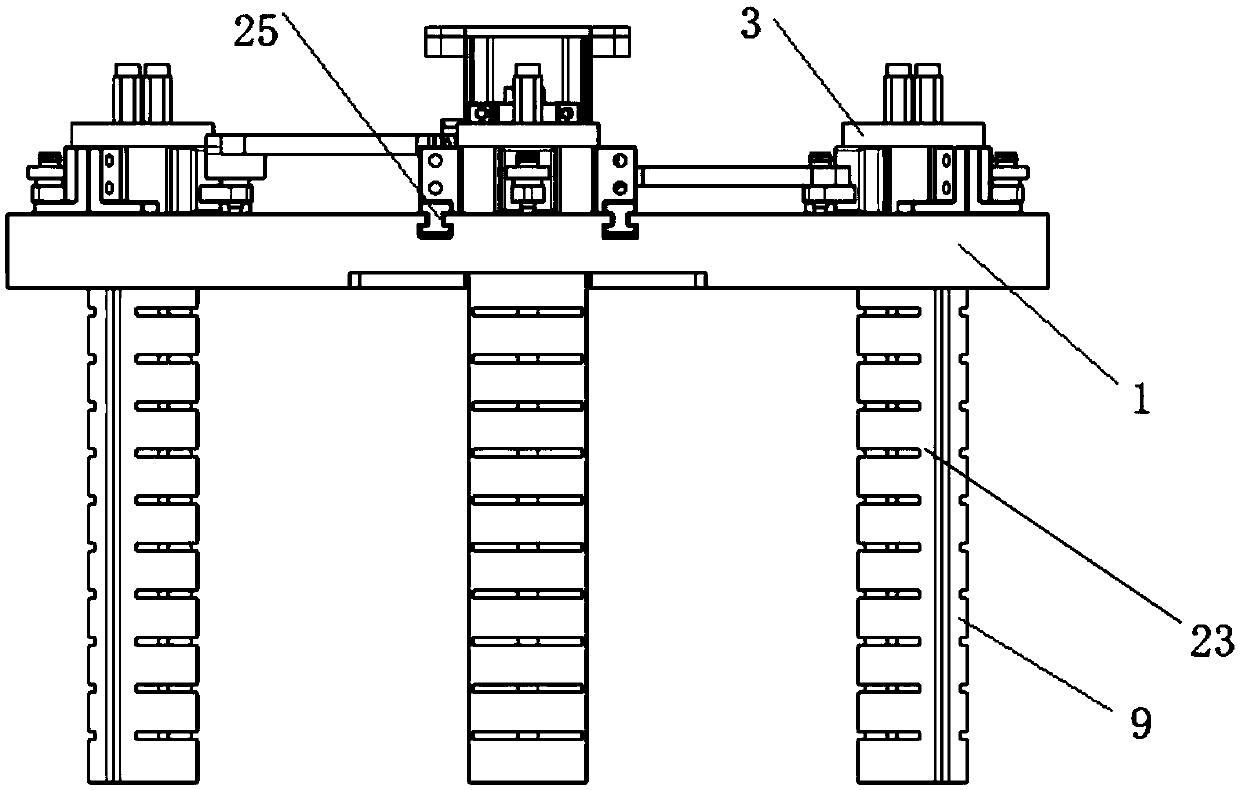
[0038] see Figure 1 to Figure 17 , the multi-degree-of-freedom and multi-scale software grabbing device of a preferred embodiment of the present invention includes an installation platform 1, a crankshaft assembly and at least three sets of finger assemblies, the crankshaft assembly includes a crankshaft 5 positioned above the installation platform, and a drive gear connected to the crankshaft 8. The drive motor that drives the drive gear to rotate. The crankshaft includes at least three connecting shafts 11, the angle between each two connecting shafts is 60 degrees, and the two ends of the connecting shafts are respectively provided with hinged shafts 12 located on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More