

Quadruped robot based on four-bar mechanism
A four-link mechanism and quadruped robot technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of high manufacturing cost and difficult electronic control design, achieve low manufacturing cost, reduce the difficulty of electronic control design, and reduce effect of weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
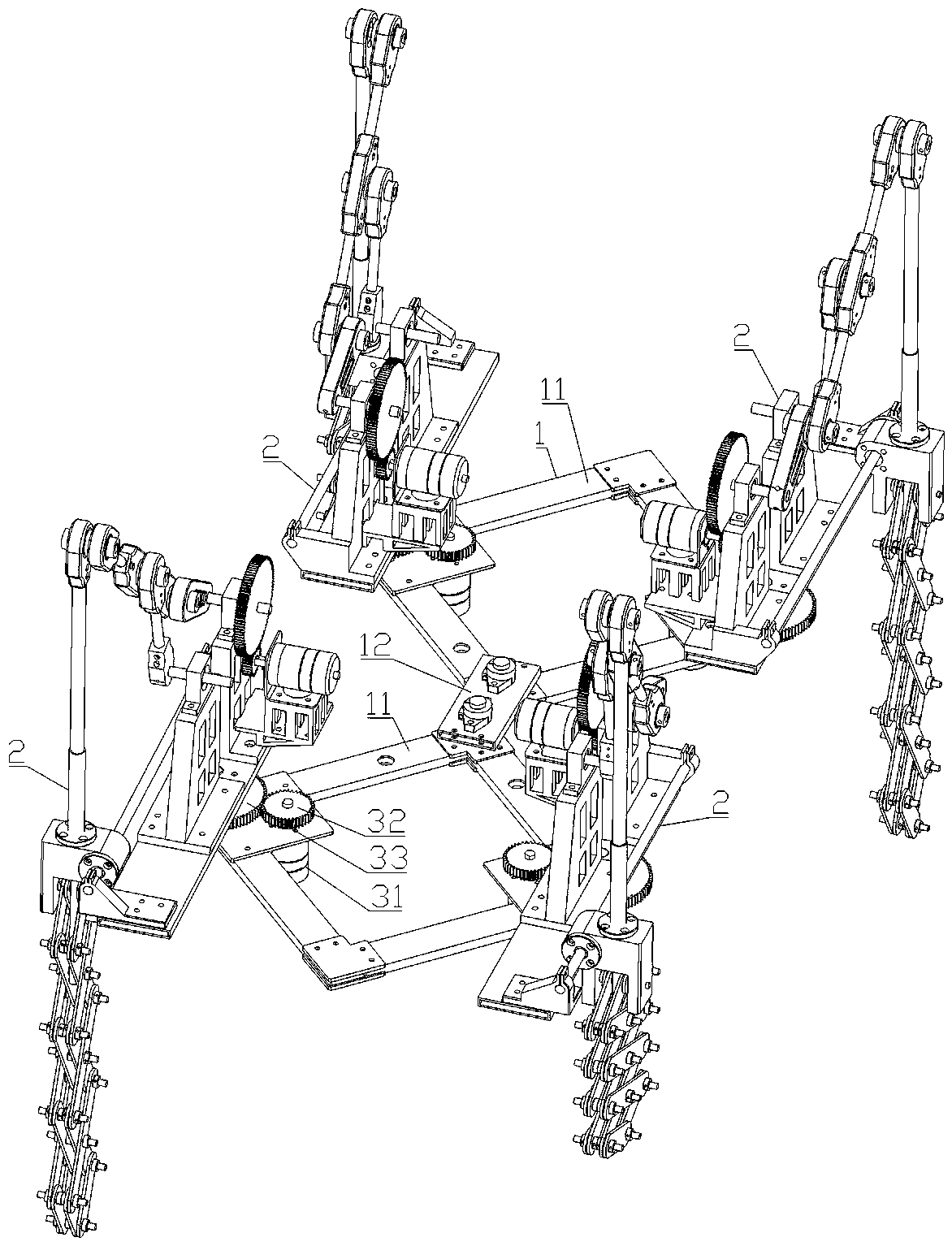
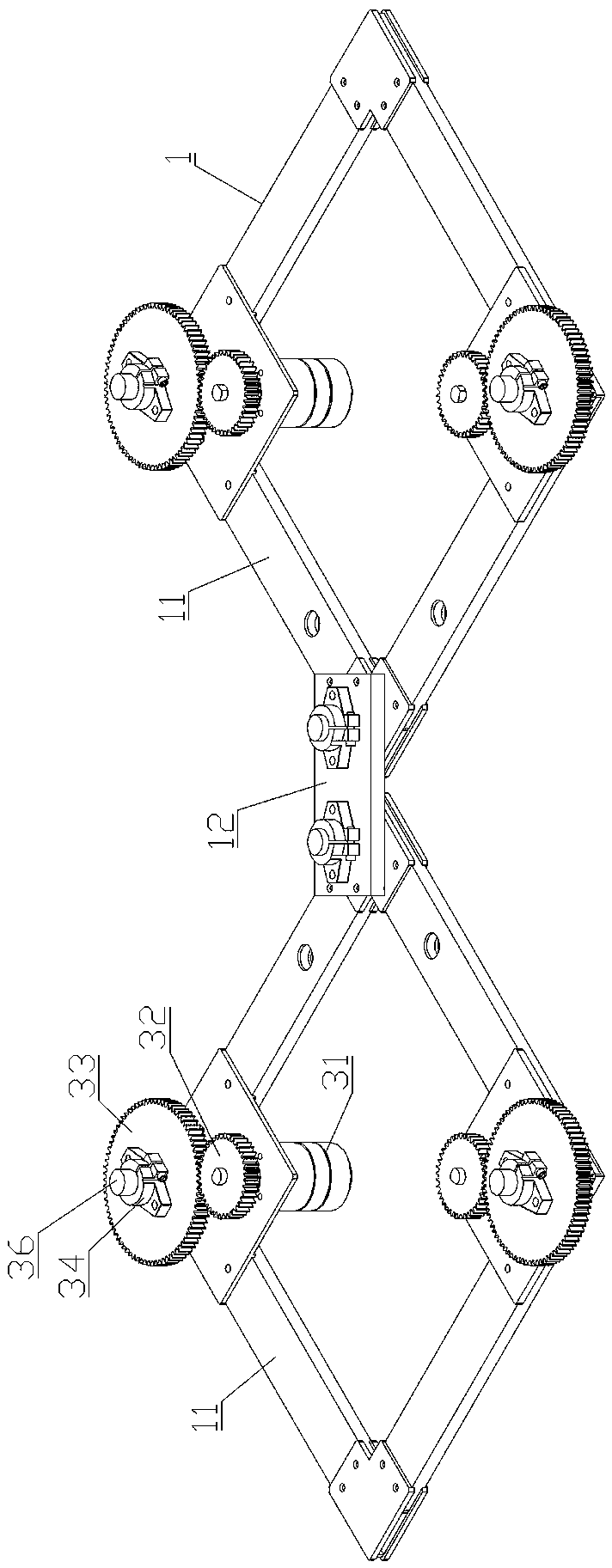
[0029] Such as Figure 1-7 As shown, the quadruped robot based on the four-bar linkage mechanism includes a base 1 , legs 2 and a steering drive mechanism arranged between the base 1 and the legs 2 .
[0030] The base 1 comprises two square frames 11 and a strip plate 12 arranged between the two square frames 11, one end of the strip plate 12 is hinged with a corner of a square frame 11, and the other end of the strip plate 12 is connected to the other end of the strip plate 12. The corners of a square frame 11 are affixed. The square frames 11 can rotate around their hinges with the strip plates 12 respectively. The base 1 based on this design can reduce the minimum turning radius of the quadruped robot.
[0031] Two pairs of four legs are symmetrically installed on both sides of the front end and both sides of the rear end of the base 1 . Among the four legs, two of them are installed at two adjacent corners on both sides of the hinge joint between a square frame 11 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More