

Visible light positioning method based on a particle swarm optimization extreme learning machine
An extreme learning machine and particle swarm optimization technology, applied in neural learning methods, biological models, instruments, etc., can solve problems such as suboptimal, and achieve the effect of reducing impact, improving positioning accuracy, and simple network structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
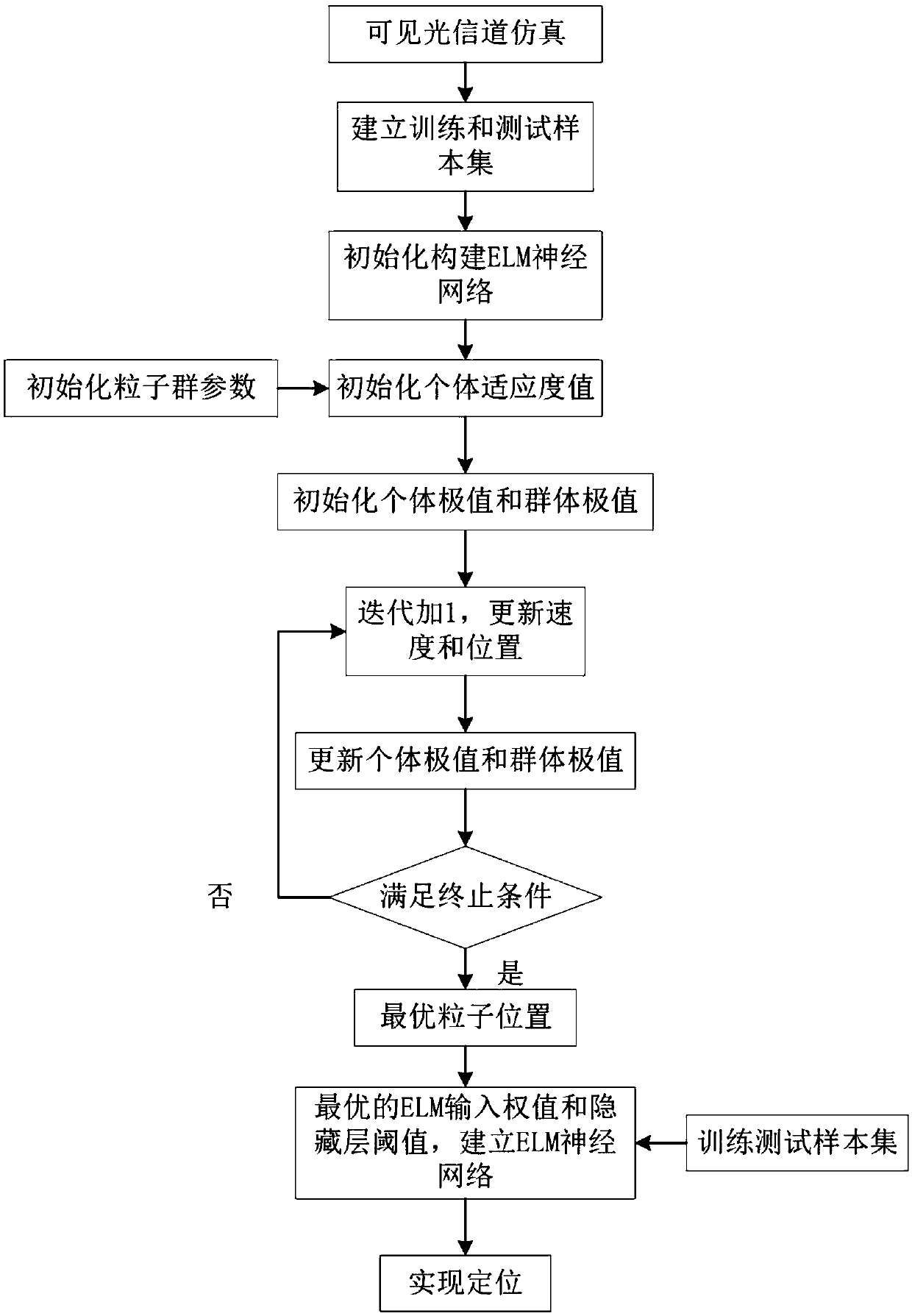
[0033] A visible light positioning method based on particle swarm optimization extreme learning machine, see figure 1 and figure 2 , the method includes the following steps:
[0034] 101: Compare the newly obtained individual fitness value of each particle with the individual extremum Pbest and the group extremum Gbest, and if the new individual fitness value is better, update the individual extremum and the group extremum; when the number of iterations When the maximum value is reached or the fitness value reaches the preset minimum value, the optimal particle is output;
[0035] 102: Use the position of the optimal particle as the input weight of the extreme learning machine and the parameters of the hidden layer threshold;
[0036] 103: Input the training sample set into the extreme learning machine neural network for neural network training, input the test sample set into the trained extreme learning machine neural network, and calculate the overall average positioning ...
Embodiment 2
[0048] Combine below figure 1 , figure 2 , and specific mathematical formulas further introduce the scheme in embodiment 1, see the following description for details:
[0049] Step 201: Obtain the receiving end power through visible light channel simulation, and the receiving end power can be expressed as:
[0050]
[0051] Among them, P rs is the electric power at the receiving end, P t is the sending power of the LED, R is the conversion rate of the photodetector, H LOS (0) is the line-of-sight propagation DC gain, H ref (0) is the first-order reflected DC gain, is the noise power.
[0052] Specifically, the line-of-sight propagation DC gain can be expressed as:
[0053]
[0054] where A is the physical area of the photodetector, m is the Lambertian order, and D d is the distance between the sending end and the receiving end, φ is the radiation angle, ψ is the incident angle, ψ c is the field of view angle of the receiver, T s (ψ) is the gain of the optic...
Embodiment 3
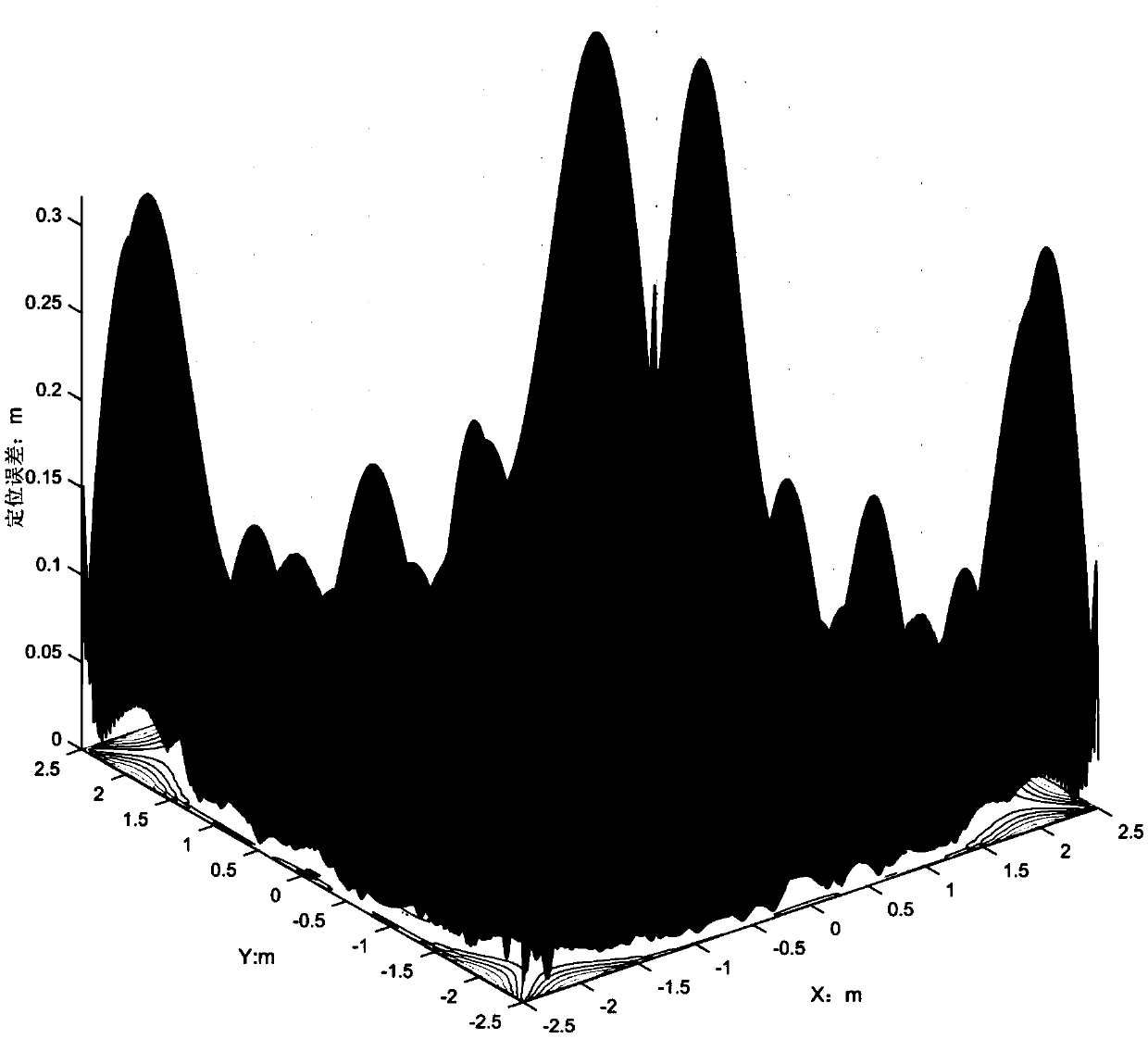
[0102] Combine below Figure 1-Figure 3 , concrete experimental data carry out feasibility verification to the scheme in embodiment 1 and 2, see the following description for details:
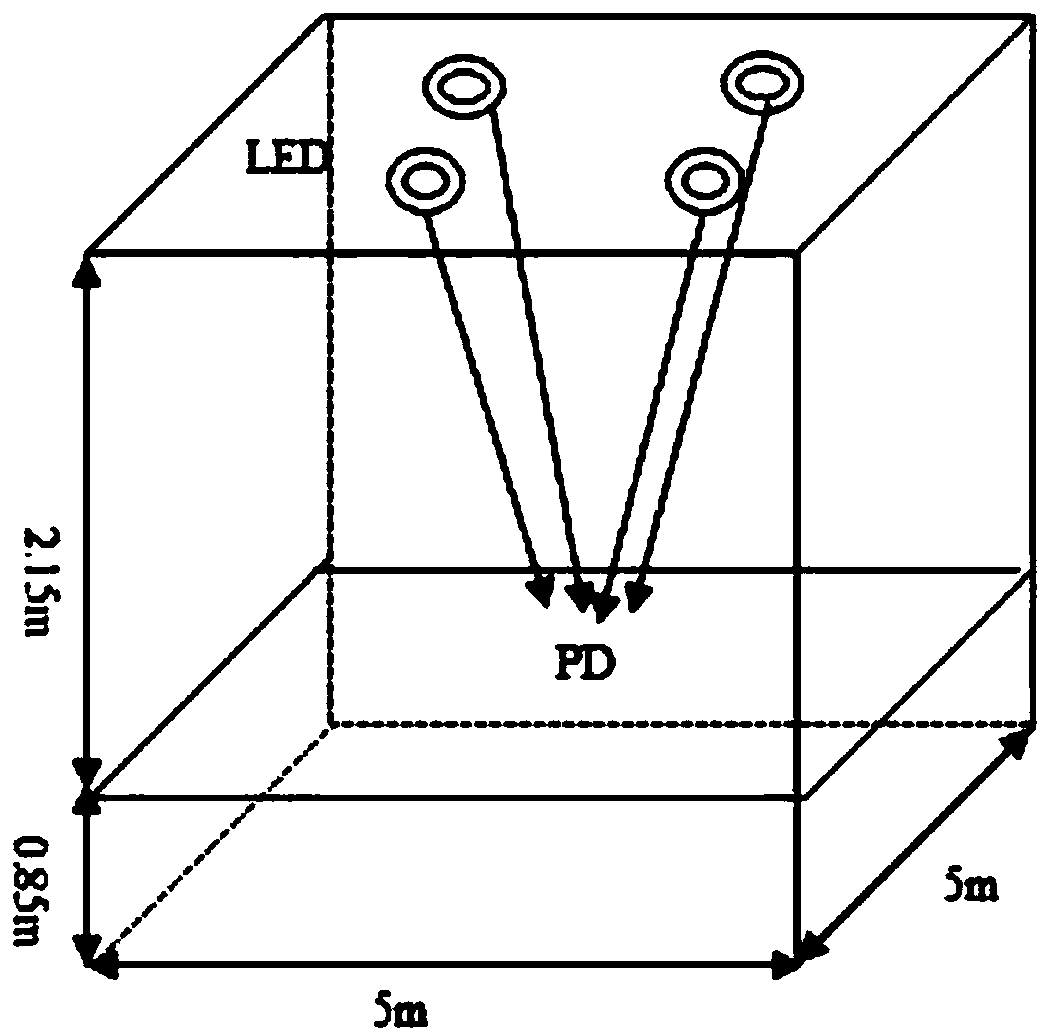
[0103] like figure 1 As shown, 4 LED arrays are located in a room of 5m×5m×3m, the coordinates of the center of the floor are (0,0,0), and the coordinates of the four LEDs are (-1.25,-1.25,3), (1.25,-1.25, 3),(-1.25,1.25,3),(1.25,1.25,3). Each LED array consists of 60×60 LEDs with an emission power of 60mw. The photodetector moves on a plane at a height of 0.85m from the ground, and its area is 1cm 2 . Code and modulate each LED light, send their respective position information, convert the optical signal into an electrical signal at the receiving end photodetector (PD), obtain the electric power at the receiving end, and use the demodulation and decoding method to obtain each LED light respectively. location information.
[0104] like figure 2 As shown, the parameters of the extreme le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More