

A hybrid biped climbing robot
A robot and hybrid technology, applied in the field of robotics, can solve the problems of low movement speed and load capacity, low robot obstacle ability, and reduced robot load capacity, so as to improve work efficiency and economic benefits, reduce manual labor, The effect of fast climbing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
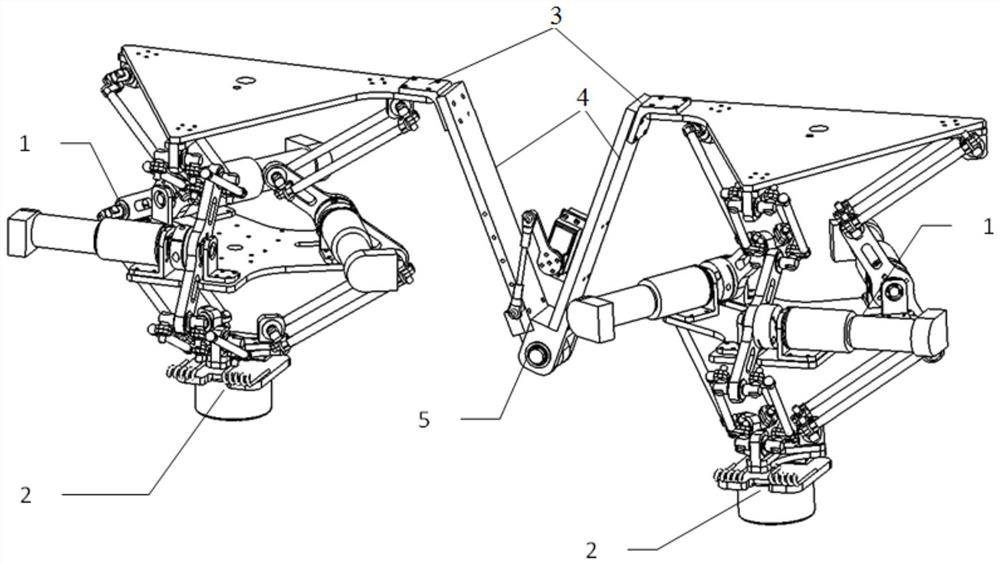
[0033] Below through embodiment, in conjunction with accompanying drawing, the technical solution of the present invention is described in further detail, the present invention is described with two walking legs 7 as an example, it should be pointed out that in fact the present invention is not limited to two walking legs 7, Can be three or more.
[0034] One, at first introduce the specific structure of the present invention.
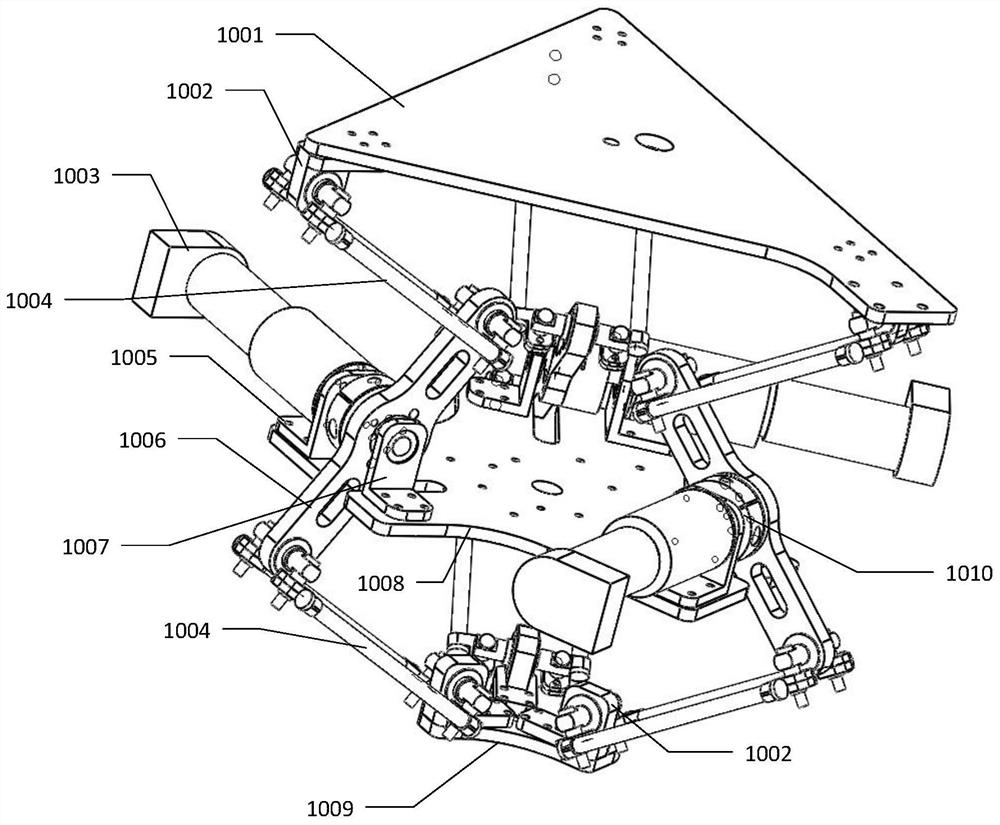
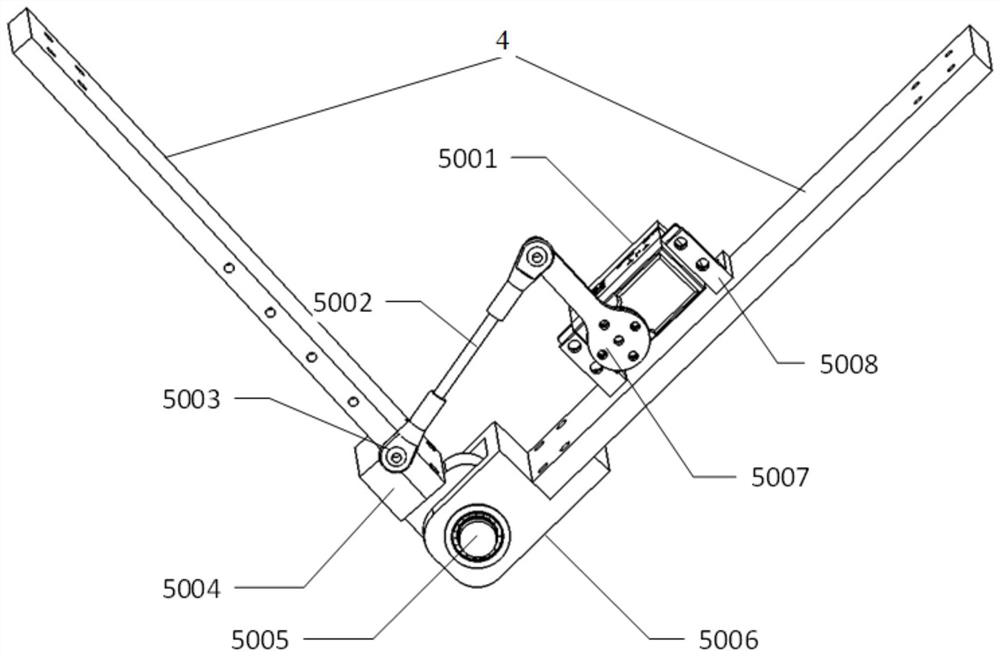
[0035] Overall structure of the present invention is as figure 1 As shown, a hybrid biped climbing robot has a substantially symmetrical structure, including two walking legs 7 and a hip joint device connecting the two walking legs 7, and the walking legs 7 include a hybrid mechanical arm 1 and The electromagnetic foot 2 located at the bottom of the hybrid robot arm 1 includes a pair of hip arms 4, a pair of hybrid robot arms 1, a hip rotation joint 5, and a pair of electromagnetic feet 2. The hybrid robot The arm 1 is a double-linked Delta (Delta) m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More