

Method for calibrating geometrical parameter error of industrial robot based on two-step method
A technology of industrial robots and geometric parameters, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of inability to quickly put into use, cumbersome operation, and inconvenient use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further explained in detail below in conjunction with the drawings and specific embodiments, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
[0065] The invention provides a method for calibrating geometric parameter errors of industrial robots based on a two-step method, which includes the following steps
[0066] S01 Initial calibration of robot geometric parameter error
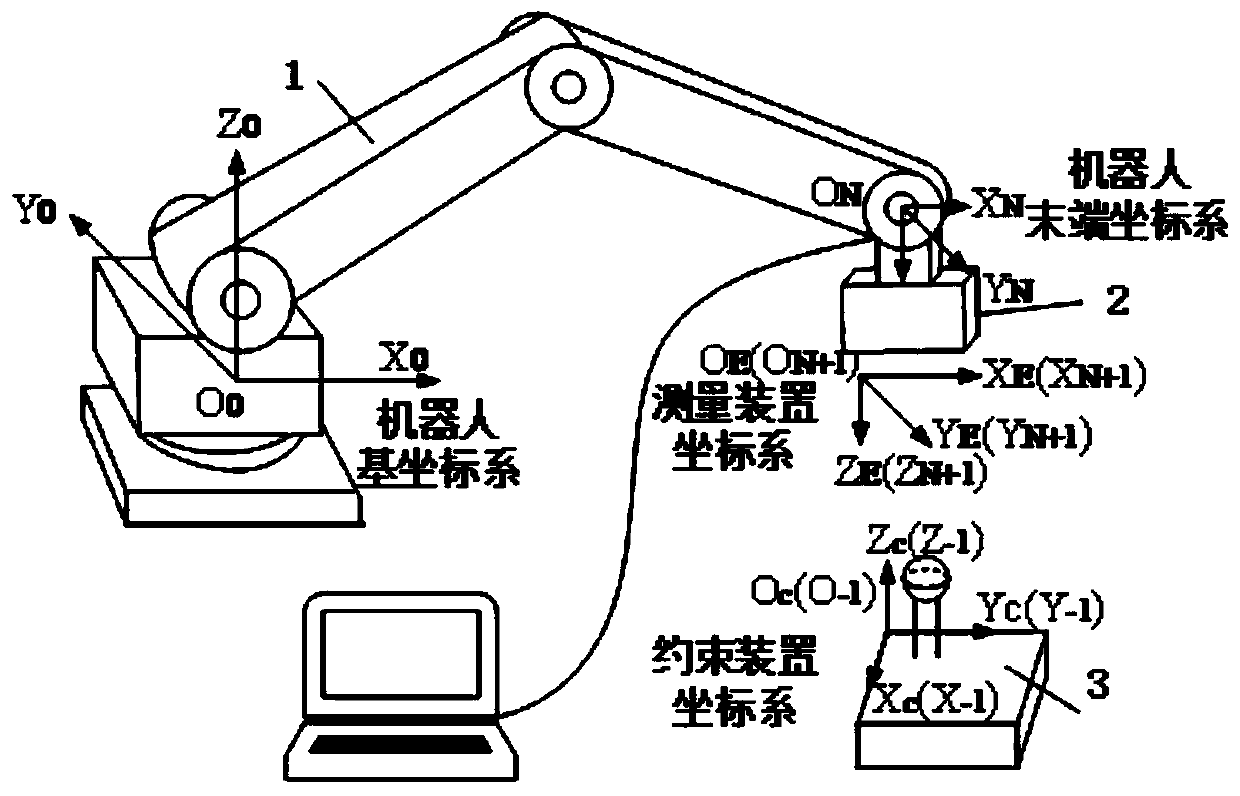
[0067] Construct a calibration coordinate system, the calibration coordinate system includes a measurement coordinate system and a constraint coordinate system, the coordinate P of the constraint point in the constraint coordinate system is obtained through measurement c And the coordinate P of the constraint point in the measurement coordinate system r Establish an error model based on the mutual conversion relationship between the constraint coordinate system, the robot linkage coordinate system, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More