

A rotation accelerometer gravity gradiometer motion error after-event compensation method
A gravity gradiometer and rotational acceleration technology, which is applied in the field of precision measurement, can solve the problems of gravity gradiometer line motion error, high-order scale coefficient mismatch, measurement error, etc., and achieve the effect of reducing the accuracy requirement and simplifying the circuit
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
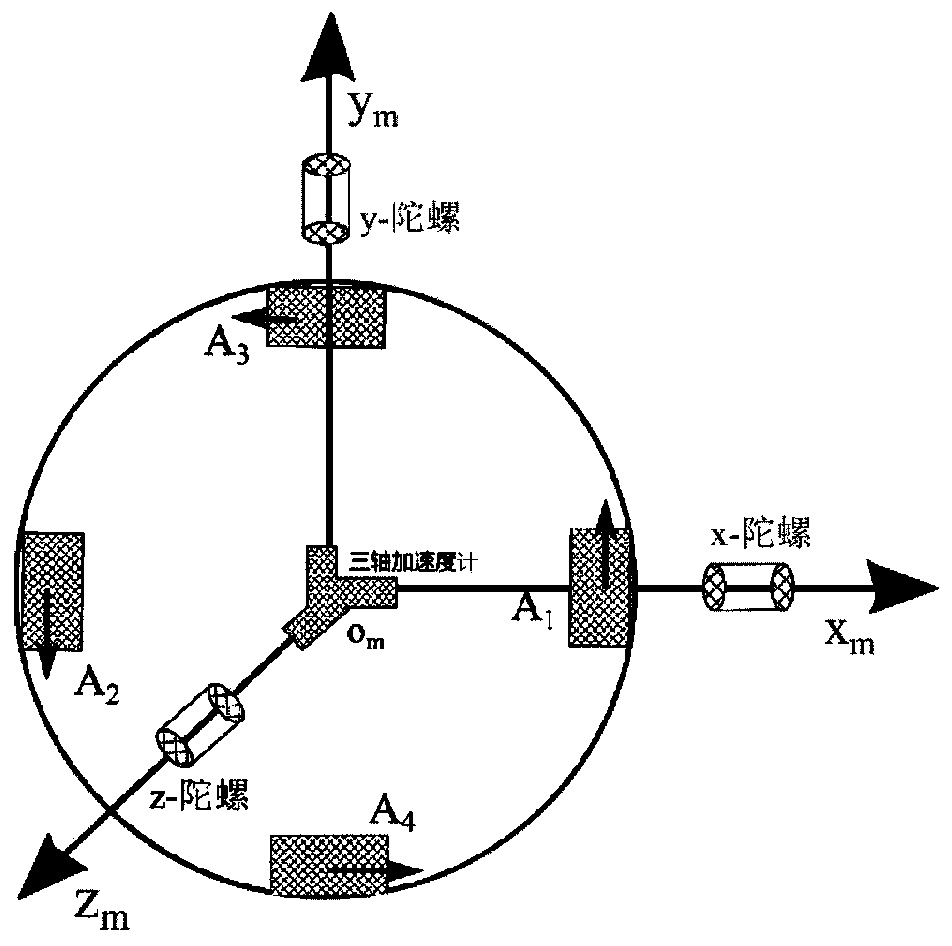
[0030] Such as figure 1 As shown, A1, A2, A3, and A4 are four accelerometers installed on the rotating accelerometer gravity gradiometer, which are gravitational gradient sensitive elements; the origin of the gravity gradiometer measurement coordinate system is located at the center of the disc, x m is the x-axis of the gravity gradiometer measurement coordinate system, y m is the y-axis of the gravity gradiometer measurement coordinate system, z m It is the z-axis of the gravity gradiometer measurement coordinate system; a three-axis accelerometer is installed at the center point of the gravity gradiometer rotating disk, and it is used to record the linear motion experienced by the gravity gradiometer during gravity gradient exploration; the gravity gradiometer measures the coordinates Gyroscopes are respectively installed on the three coordinate axes of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More