Miniature power source servo hydraulic system applied to exoskeleton robot
An exoskeleton robot and hydraulic system technology, which is applied in fluid pressure actuation system testing, fluid pressure actuation system components, servo motors, etc., can solve the problem of damage to the normal operation of the hydraulic system, large volume and weight of the hydraulic system, and loud noise, etc. problems, to achieve the effect of miniaturization and light weight, short pressure build-up delay and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The specific embodiments of the present invention will be further described in detail by describing the embodiments below with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
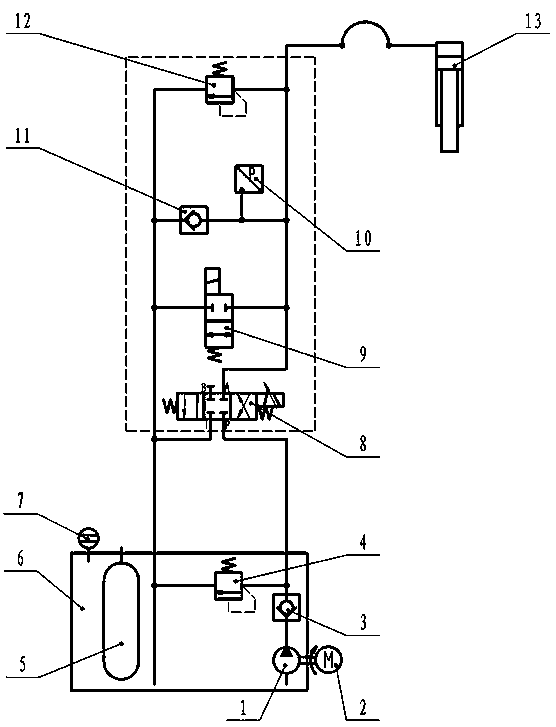
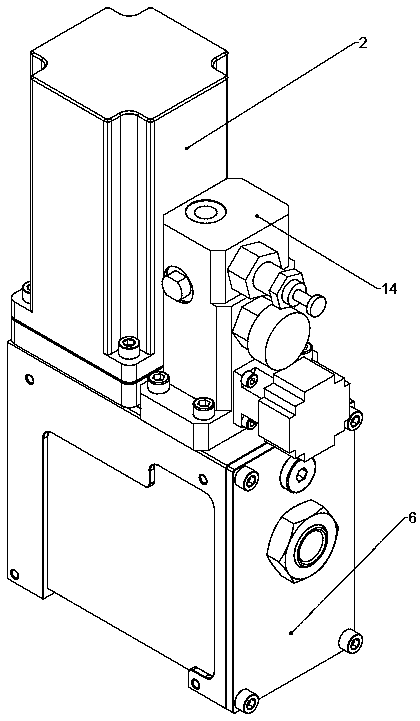
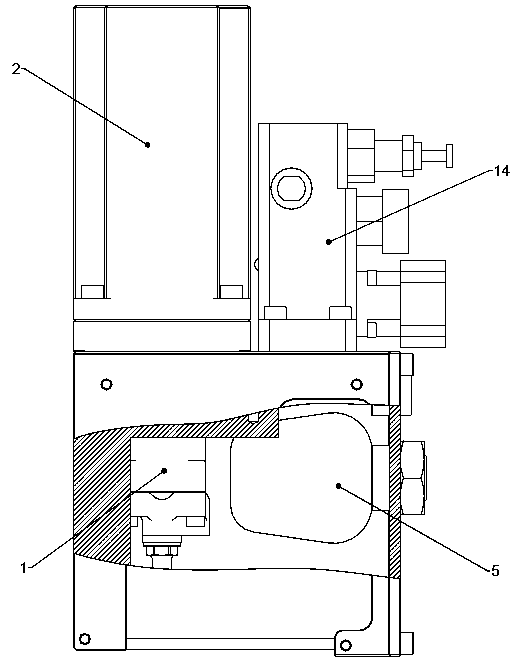
[0019] combine figure 1 , figure 2 , image 3 , Figure 4 In this embodiment, taking the control of an exoskeleton knee joint as an example, a miniature independent power source servo hydraulic system applied to an exoskeleton robot is designed. The hydraulic system controls the action of the exoskeleton knee joint 15 by controlling the knee joint plunger cylinder 13 . The hydraulic system is composed of four parts: hydraulic power system, hydraulic servo control system, air bag type closed oil tank system, and hydraulic actuators.
[0020] The hydraulic actuator is a plunger cylinder 13 .
[0021] The hydraulic power system is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com