

Unmanned aerial vehicle group formation method based on Boid model
A technology of unmanned aerial vehicle and quadrotor unmanned aerial vehicle, applied in the field of unmanned aerial vehicle group formation based on the Boid model, to achieve the effect of guaranteed control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] specific implementation plan
[0047] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
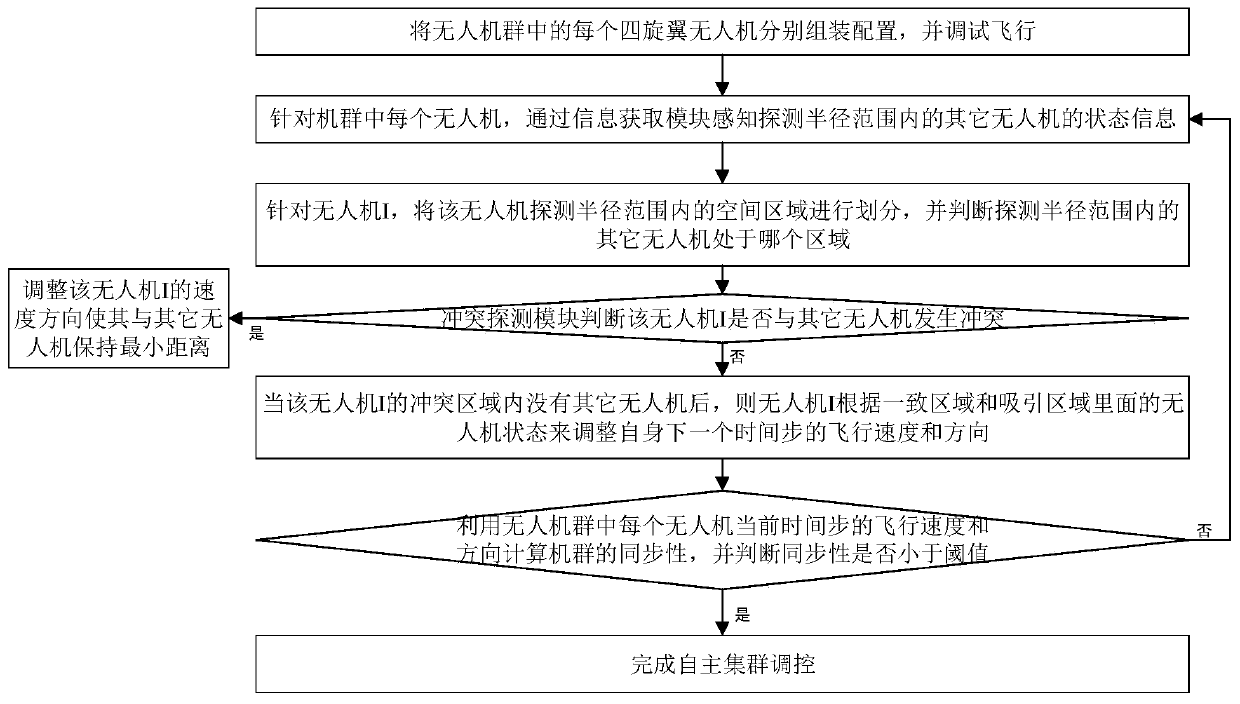
[0048] The invention provides a method for formation of unmanned aerial vehicles based on the Boid model. The unmanned aerial vehicle obtains the flight data of other unmanned aerial vehicles within the detection range through the information acquisition module, and then adjusts the flight data of the unmanned aerial vehicle in the next time step based on the Boid model. Flight strategy to achieve the effect of cluster formation.
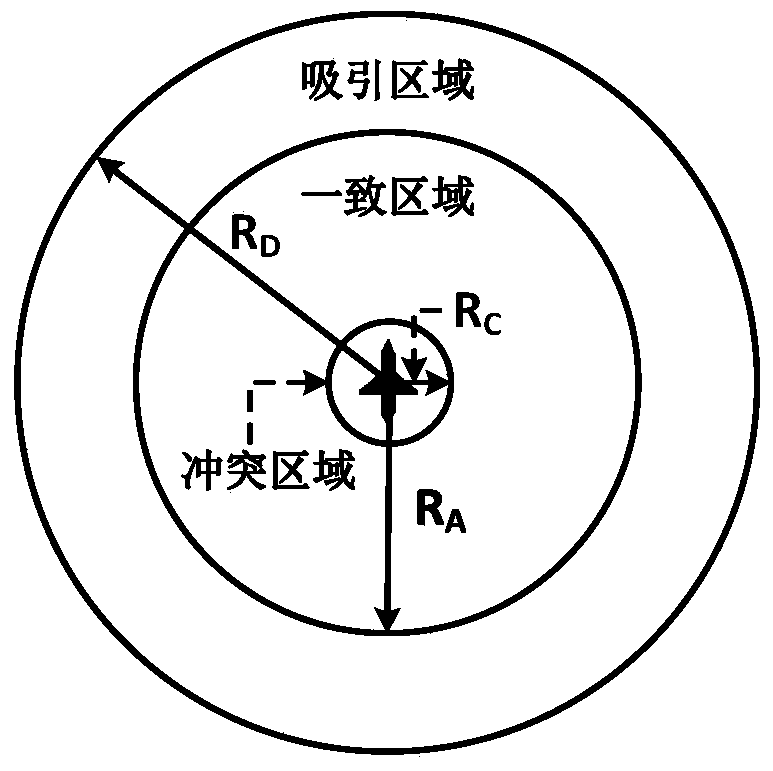
[0049] The simple rule of the Boid model is: the UAV calculates the distance to other UAVs within the detection range. If it is far away from other UAVs, it tends to gather, that is, try to get closer to other UAVs, so as to Avoid being isolated; if it is close to other drones, it will tend to repel, that is, prevent conflicts with other drones; The speed of the machine remains the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More