Two-wheel driven low-speed driverless patrol vehicle system and operating method
A technology of unmanned driving and patrol cars, which is applied in the direction of motor vehicles, control/regulation systems, non-electric variable control, etc., can solve the problems of unfavorable dynamic performance, low reliability, and inability to pass through spaces of unmanned patrol cars, and achieve The effect of strong program portability, enhanced anti-interference ability, and shortened development cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below.
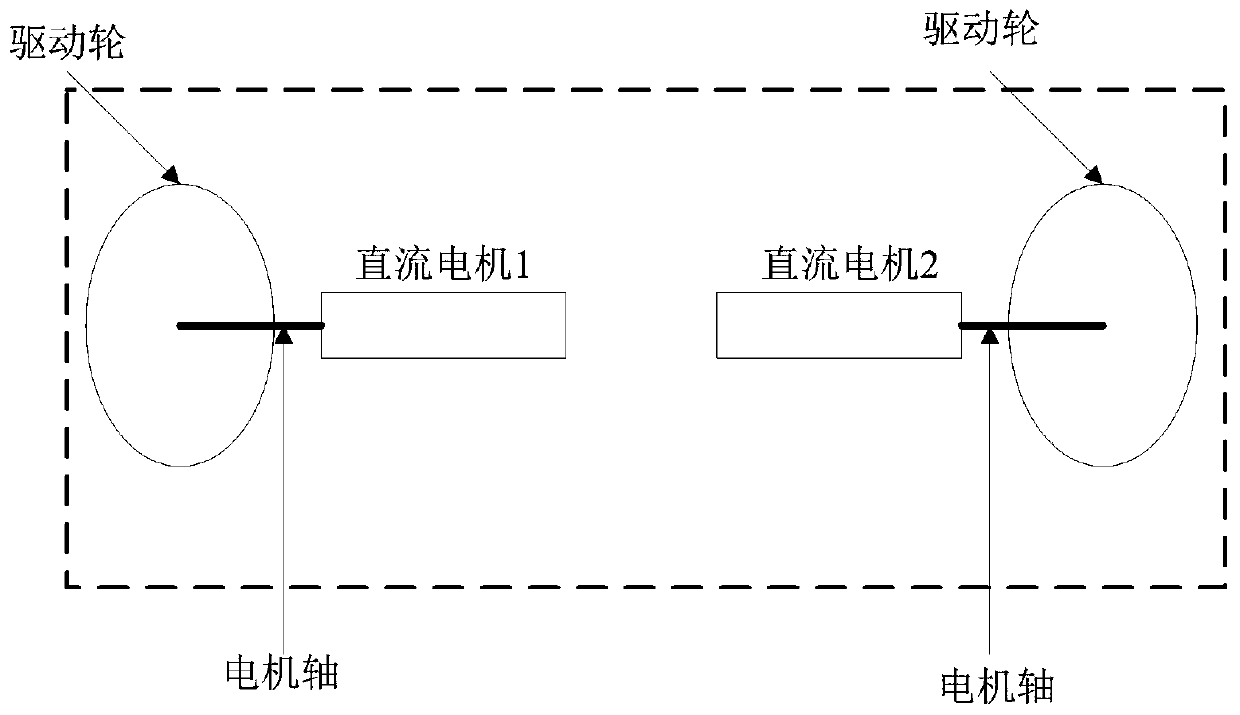
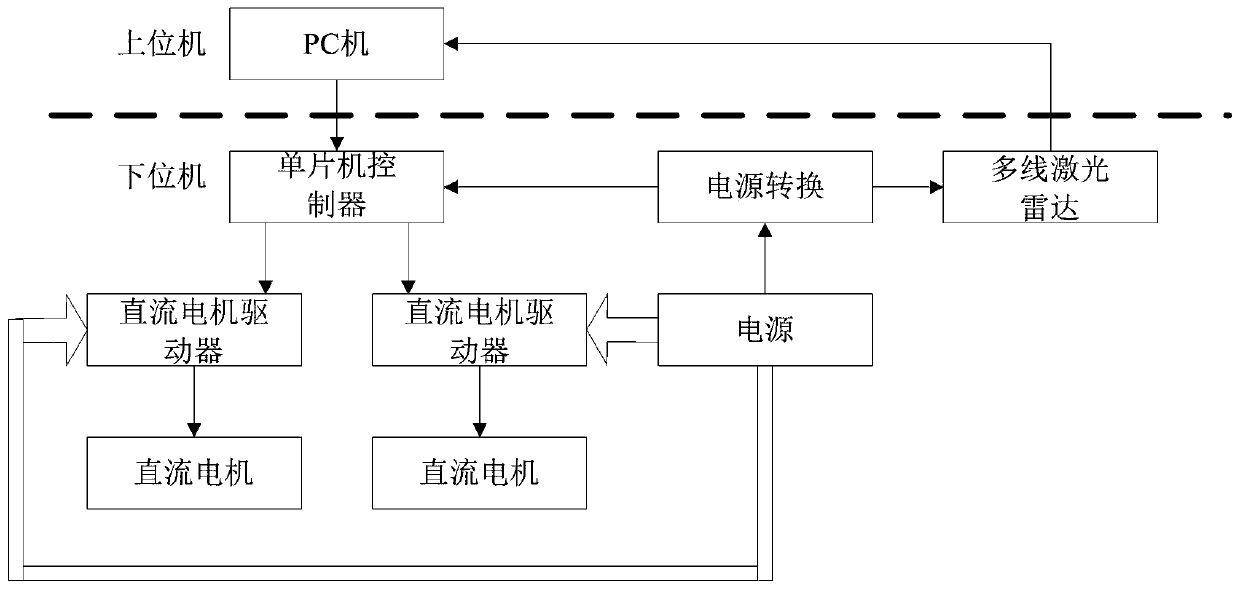
[0060] As shown in the figure, a two-wheel drive low-speed unmanned patrol vehicle system includes a two-wheel drive system, a front blind spot detection and obstacle avoidance system, a rear blind spot detection and obstacle avoidance system, an environment detection system and a central control system,
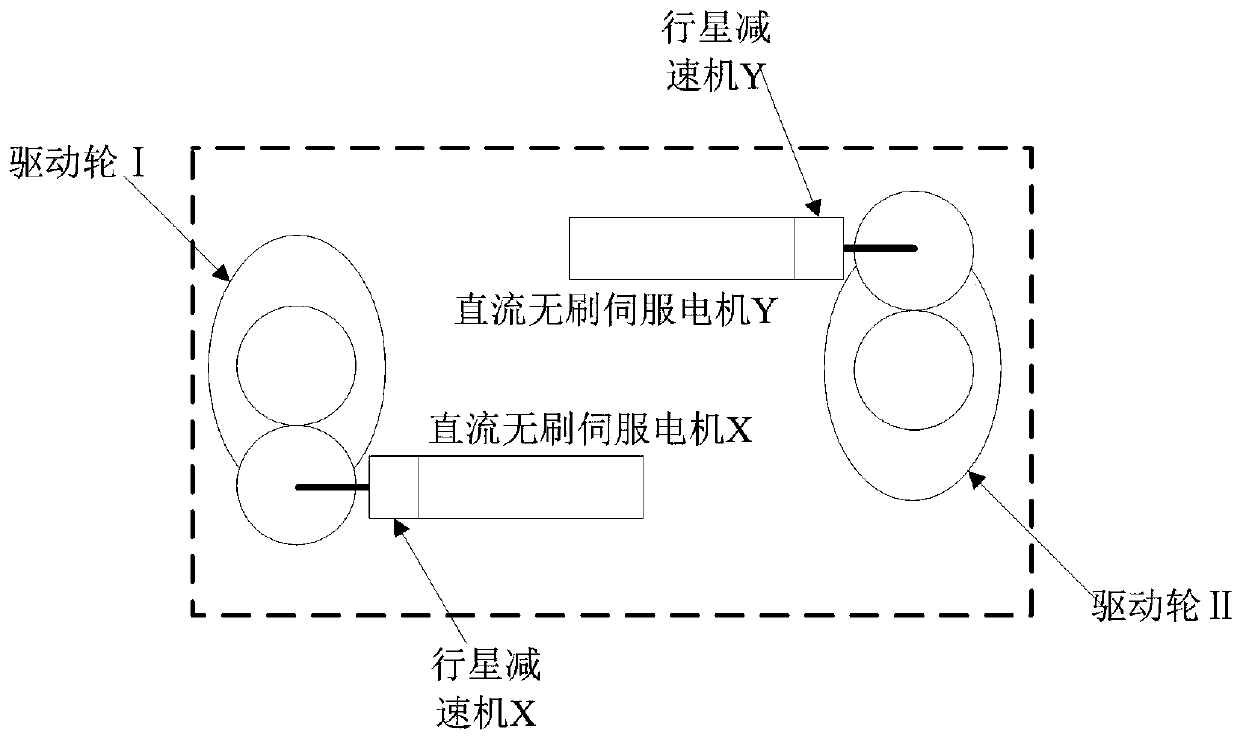
[0061] The two-wheel drive system includes DC brushless servo motor driver, DC brushless servo motor X, planetary reducer X, DC brushless servo motor Y and planetary reducer Y, DC brushless servo motor driver and DC brushless servo motor respectively The motor X is connected to the DC brushless servo motor Y, the DC brushless servo motor X is connected to the input end of the planetary reducer X, the output end of the planetary reducer X is connected to the drive wheel I, and the DC brushless servo motor Y is connected to the planetary reducer X. The input end of the reducer Y is connected by transmission, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More