

An infrared small unmanned aerial vehicle target detection and tracking method under a complex background
A small unmanned aerial vehicle, target detection technology, applied in computer parts, image data processing, instruments, etc., can solve citizens' personal privacy and life and property safety hazards, lack of detection and countermeasures, drone black flying, etc. problems, to achieve fast and accurate detection and tracking, high accuracy and real-time processing speed, and improve the effect of detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with drawings and embodiments.
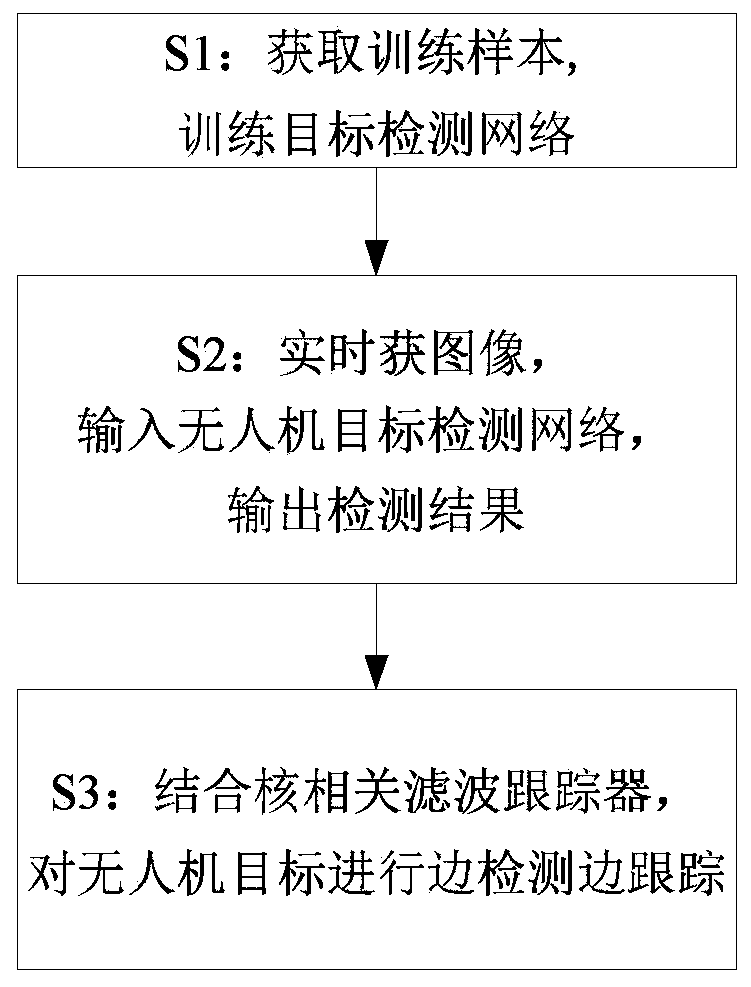
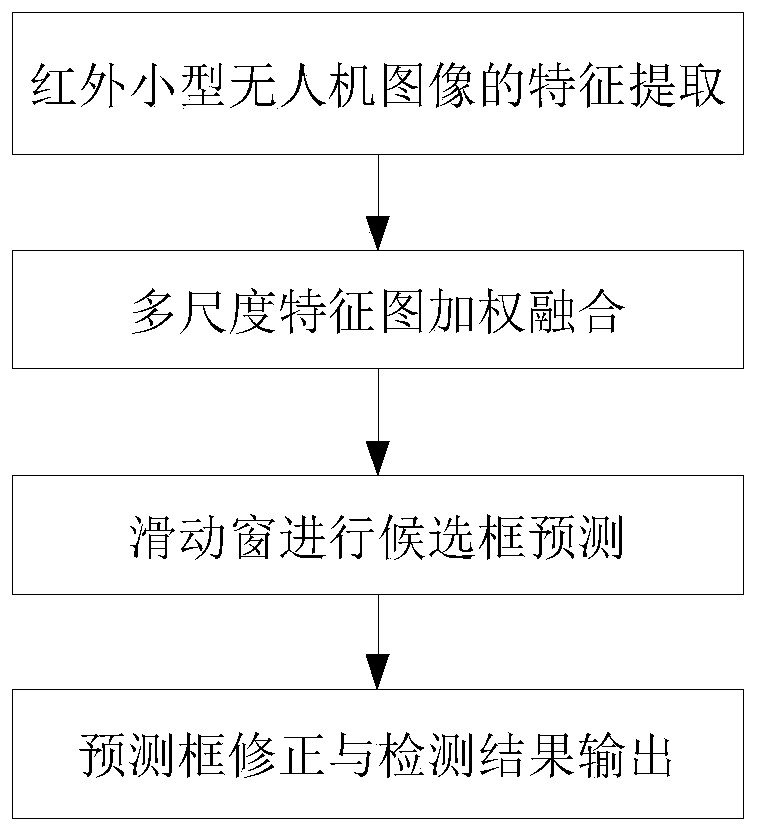
[0037] Such as figure 1 , figure 2 It is a flow chart of an infrared small UAV target detection and tracking method under a complex background in the present invention. Each step will be described in conjunction with the implementation process below.
[0038] (S1) Obtain training samples, and train a deep convolutional neural network as a UAV target detection network;
[0039] (S11) Collect infrared image data sets, and use infrared long-wave and medium-wave lenses to extensively record images of small UAV targets. In order to satisfy the reliability and generalization ability of the algorithm, the richness of experimental data should be increased as much as possible, such as covering different models and flying postures of UAV targets, different backgrounds, temperatures, weathers, detection distances and pitch angles.
[0040] Manually mark the acquired UAV image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More