

Unmanned ship reinforcement learning controller structure with data drive and design method thereof
An unmanned ship and controller technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of poor robustness, cumbersome establishment and setting of controller parameters, and no adaptive learning ability. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
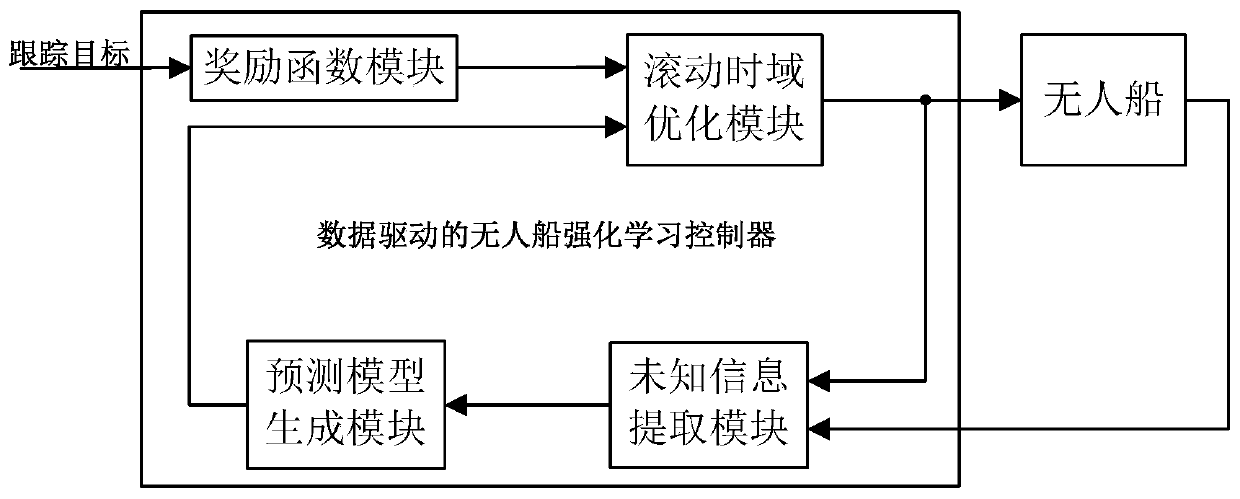
[0048] The structure of a data-driven unmanned ship reinforcement learning controller related to the present invention is as follows: figure 1 shown. The present invention will be further described below with regard to a specific unmanned ship tracking a moving target simulation as an example.
[0049] A data-driven design method for the reinforcement learning controller structure of unmanned ships satisfies formulas (1)-(9), and the specific parameters are as follows:
[0050] In this embodiment, the unmanned ship is an underactuated unmanned ship, that is, the lateral velocity control input component τ v is 0, the longitudinal velocity control input component τ u Divided into seven gears [-10 -4 -2 0 2 4 10], the input component of yaw rate control τ r Divided into [-5 -1 01 2 5] six levels.
[0051] The tracking target is a moving target, and the initial pose state of the target is:
[0052]
[0053] longitudinal speed horizontal drift speed v r =0, yaw angular ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More