

Multi-robot machining method for rotary structural part
A multi-robot and processing method technology, applied in the direction of manipulator, manufacturing tool, program-controlled manipulator, etc., can solve the problems of difficult to meet the machine tool stroke, single processing object, low processing efficiency, etc., and achieve reasonable cutting parameter setting, large processing range, The effect of improving processing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments disclosed in the present invention will be further described in detail below in conjunction with the accompanying drawings.
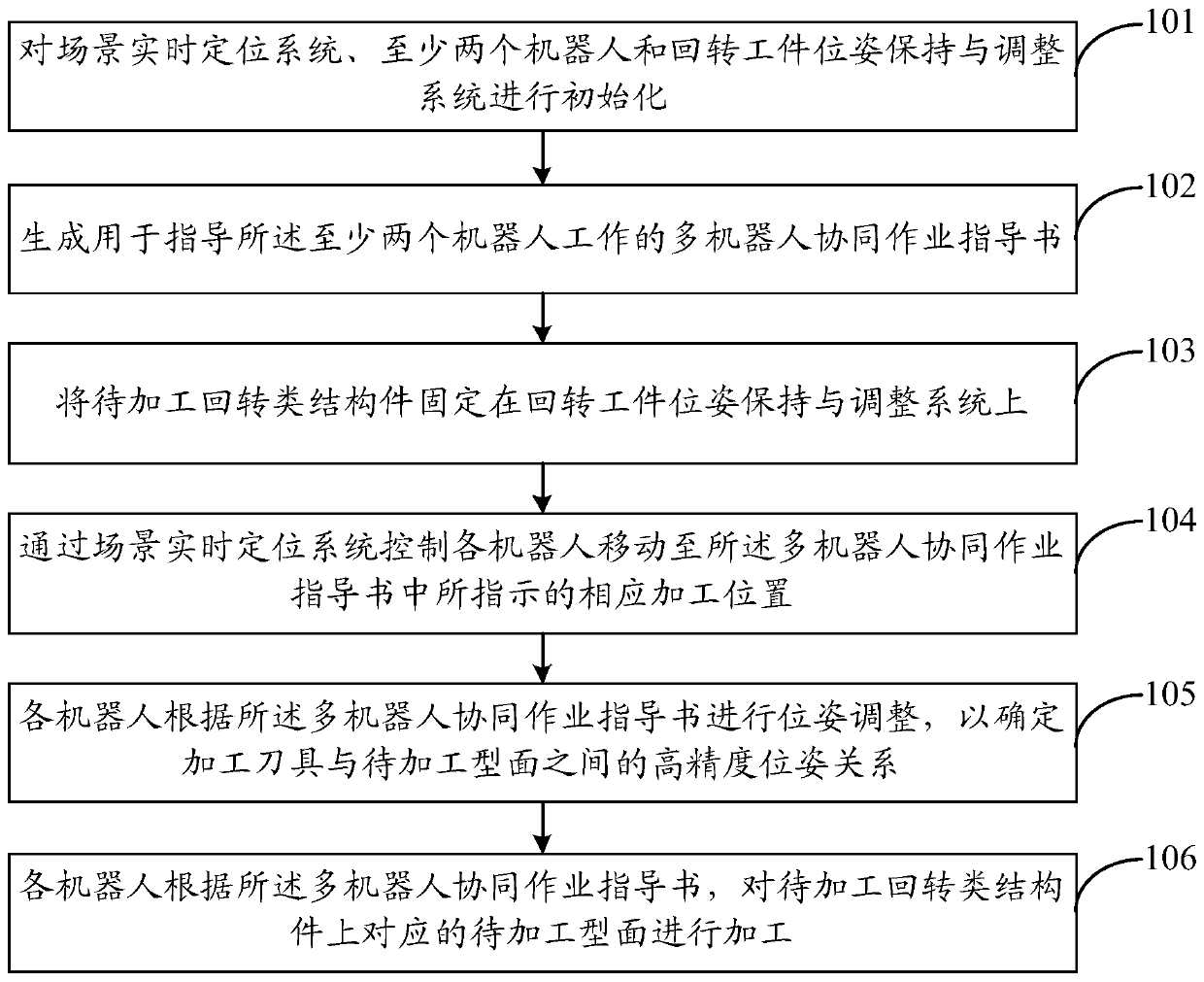
[0048] Such as Figure 1~3 , in this embodiment, the multi-robot processing method of the rotary structure includes:
[0049] Step 101 , initialize the scene real-time positioning system 1 , at least two robots, and the rotary workpiece pose maintenance and adjustment system 7 .
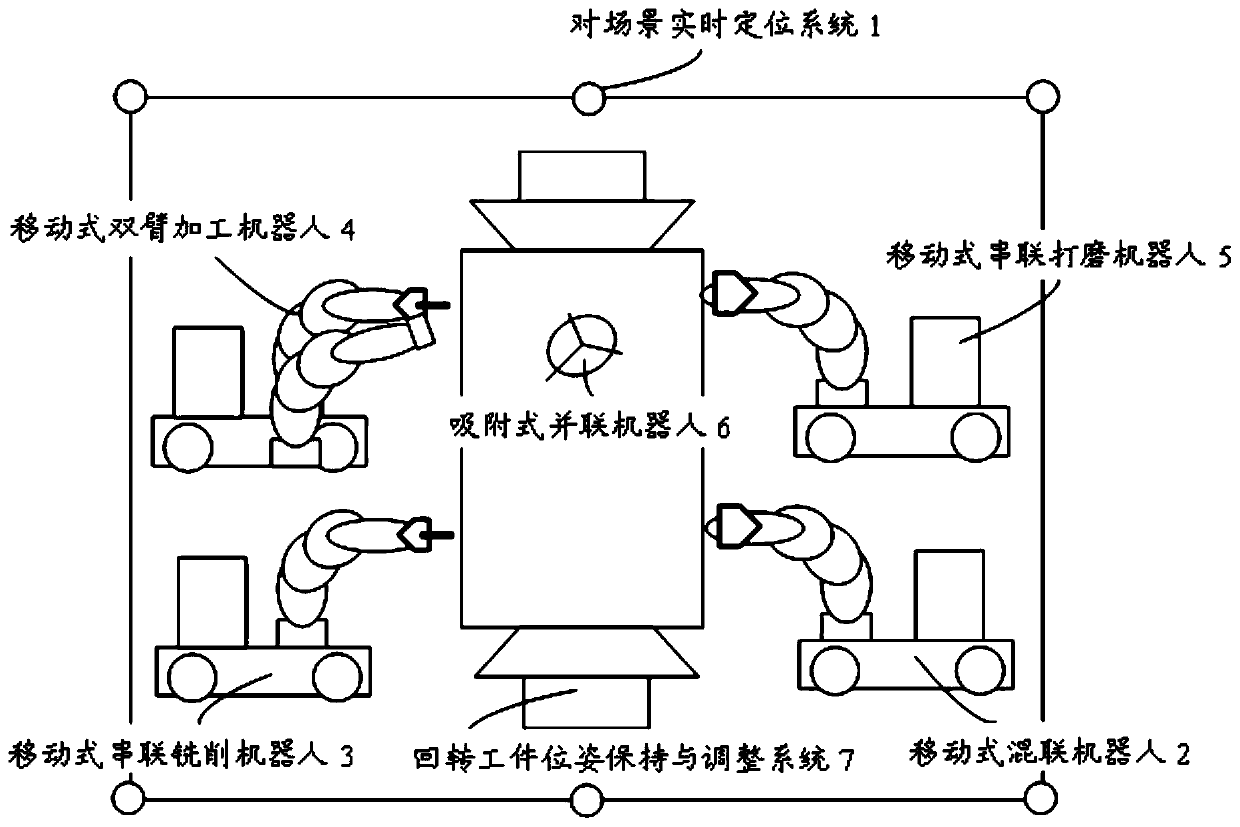
[0050] The scene real-time positioning system 1 is composed of several indoor GPS transmitting stations and receiving stations installed on the omnidirectional mobile platform. The range can cover the surface to be processed.
[0051] The at least two robots may specifically include: a mobile hybrid robot 2 , a mobile serial milling robot 3 , a mobile dual-arm processing robot 4 , a mobile serial grinding robot 5 and an adsorption parallel robot 6 . in:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More