

Wrist rotating clamp structure for hydraulic manipulator
A manipulator and rotary clamp technology, applied in the field of manipulators, can solve the problems of restricting the long-term development of hydraulic manipulators, complex motor structure, insufficient input power, etc., and achieve the effect of easy refinement, simple structure, and simplified structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following examples can make those skilled in the technical field understand the present invention more comprehensively, but do not limit the present invention in any way.
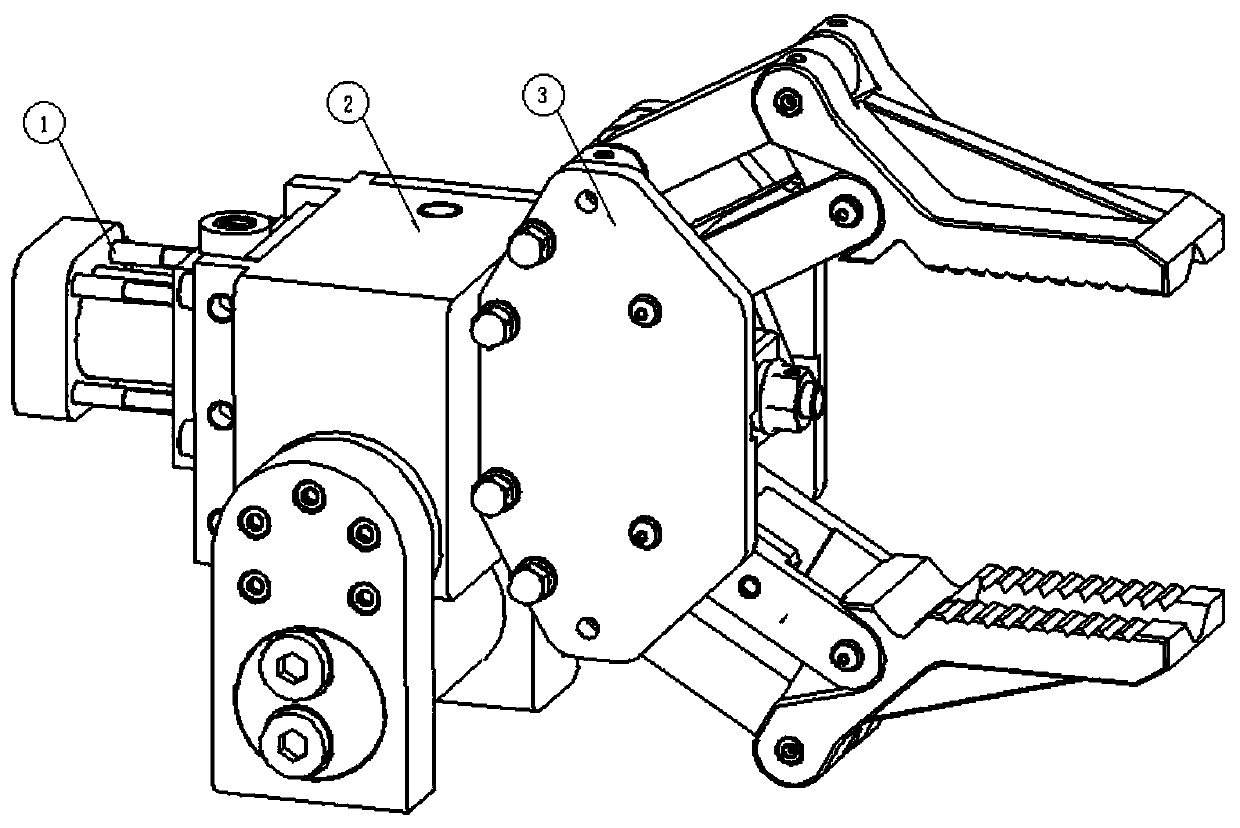
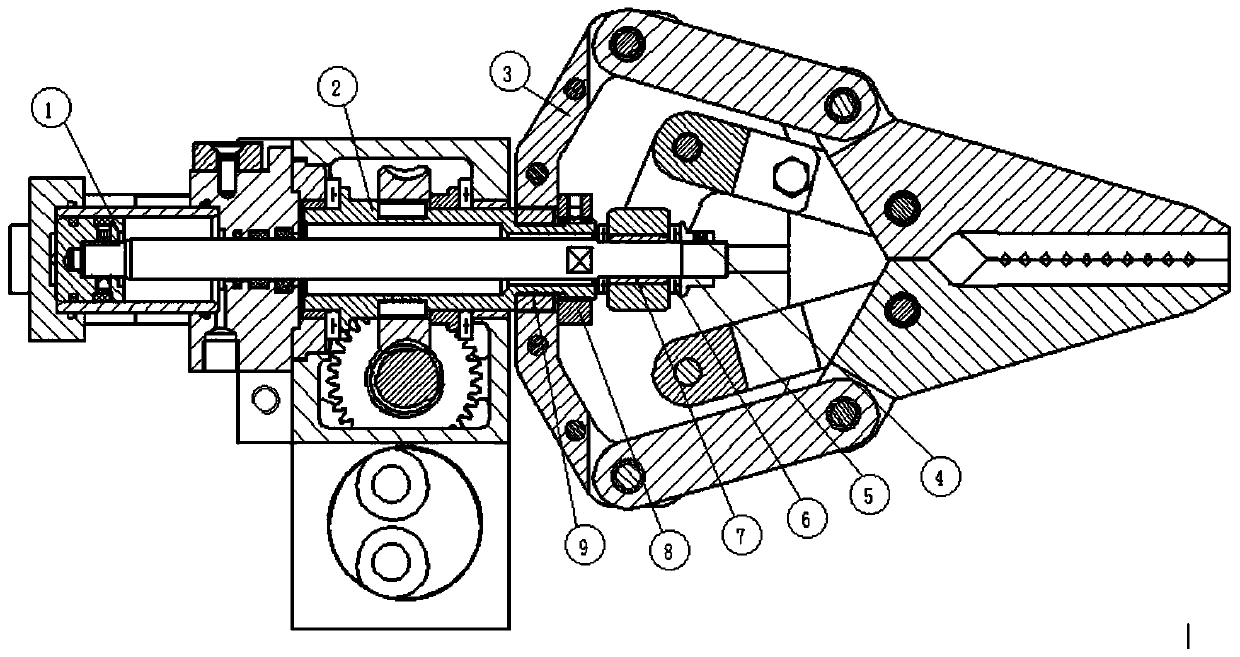
[0040] The wrist clamp structure for the hydraulic manipulator provided by the present invention includes three parts: a linear oil cylinder 1 , a speed reduction mechanism 2 and a gripper 3 . Among them: the deceleration mechanism 2 is used to realize the amplification of the torque of the micro hydraulic motor 2-1 and the reduction of the rotational speed, and further realize the low-speed and high-torque rotation of the gripper 3; the linear oil cylinder 1 drives the parallel opening and closing of the gripper 3 through a parallelogram mechanism to realize Grab and release of objects.
[0041] figure 1 It is an isometric drawing of the actual implementation of the structure of the hydraulic mechanical wrist tong, showing the spatial positional relationship among the linear cylinder 1, the reduc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More