

UAV (unmanned aerial vehicle) landing and recycling integrated mobile platform based on six-degree-of-freedom hybrid mechanism
A hybrid mechanism and mobile platform technology, which is applied to aircraft parts, ground devices, vehicles, etc., can solve the problems of less functions and the inability to realize the UAV's inclined and stable landing, and achieve the effect of increasing the working area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments.
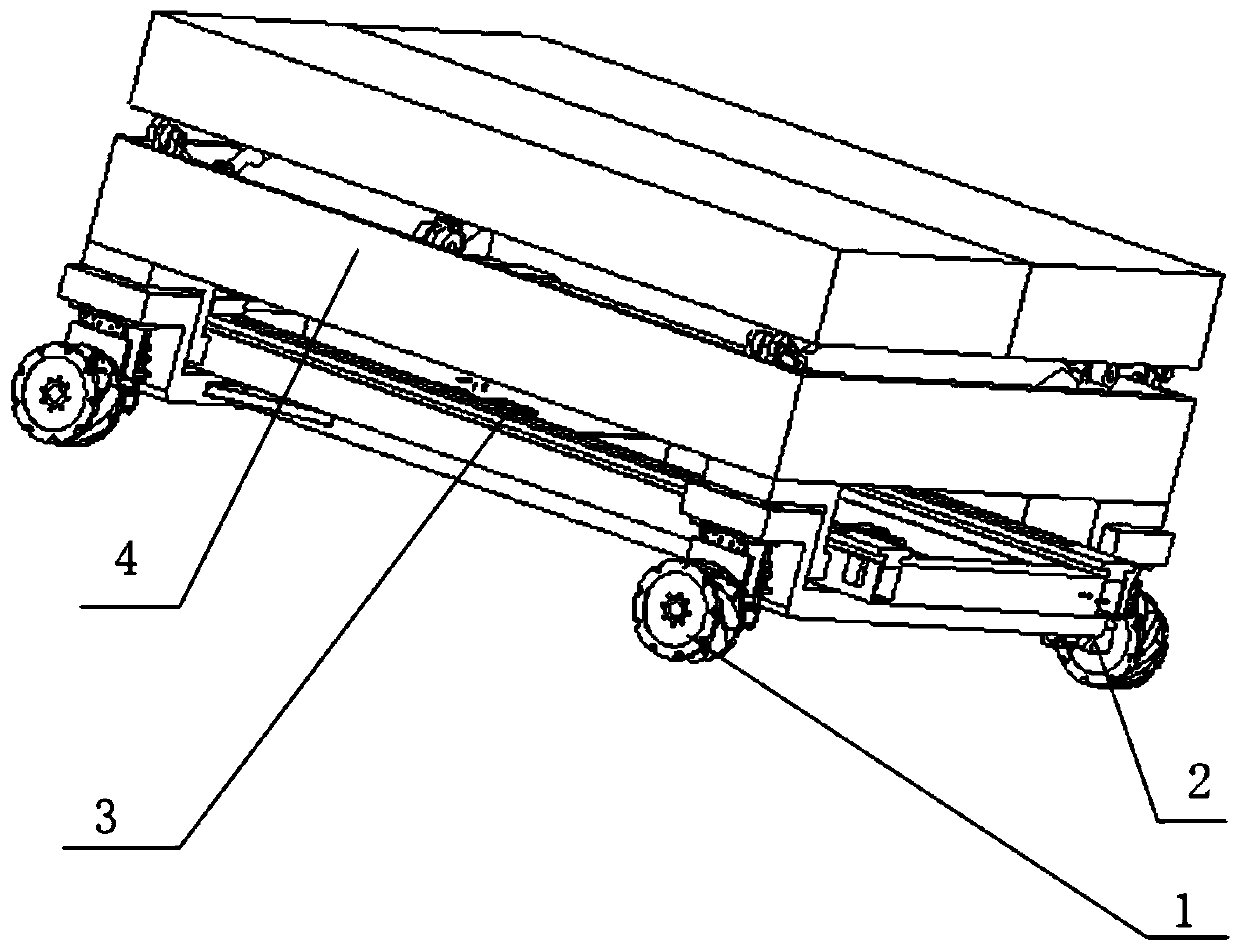
[0026] An integrated mobile platform for UAV landing and recovery based on a six-degree-of-freedom hybrid mechanism of the present invention includes wheels 1, a power system 2, an attitude adjustment system 3, and a working platform system 4, such as figure 1 As shown, the wheel 1 is placed at the bottom of the device, which is realized by four mecanum wheels that can move in all directions, and mainly provides free movement and obstacle surmounting for the car;
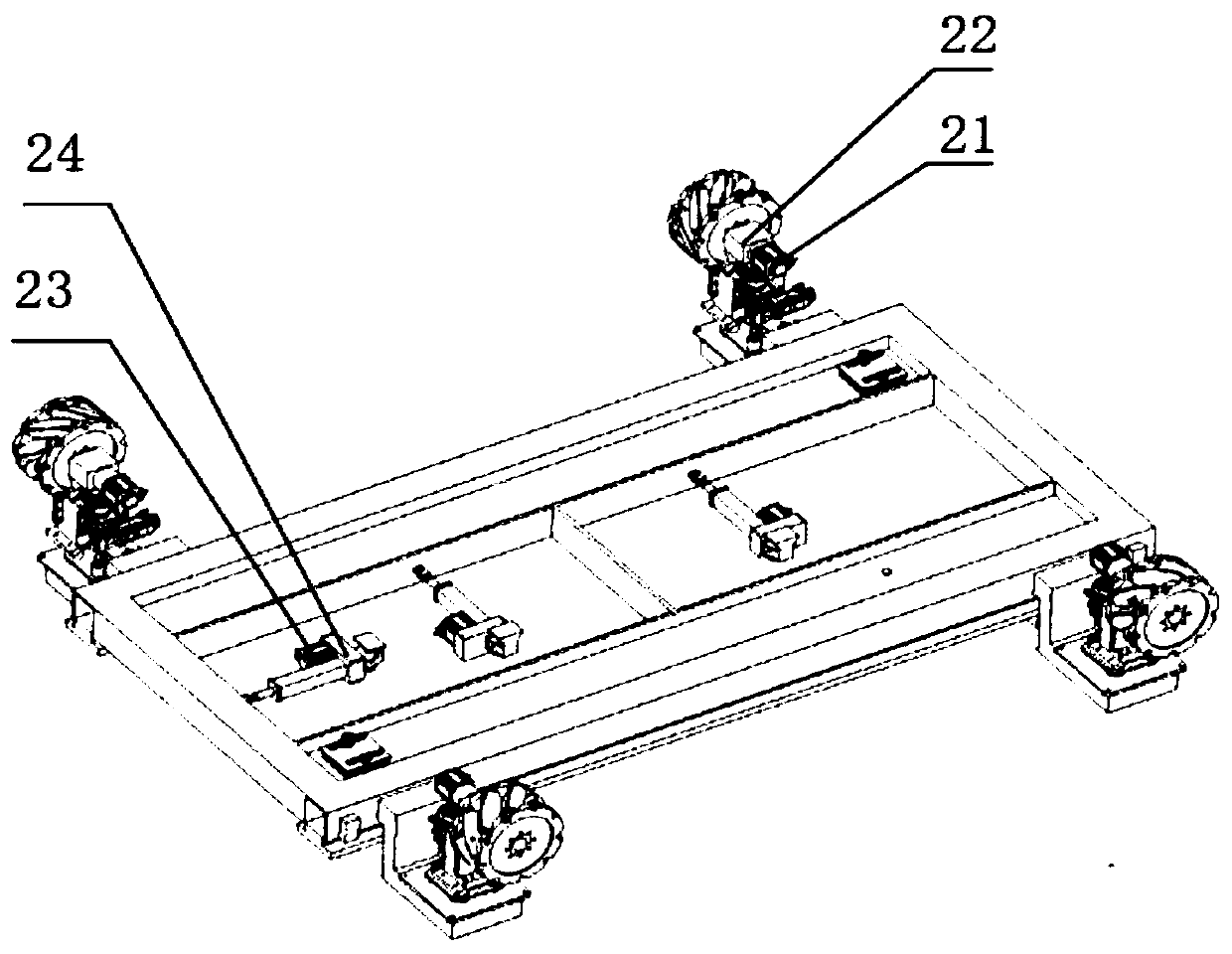
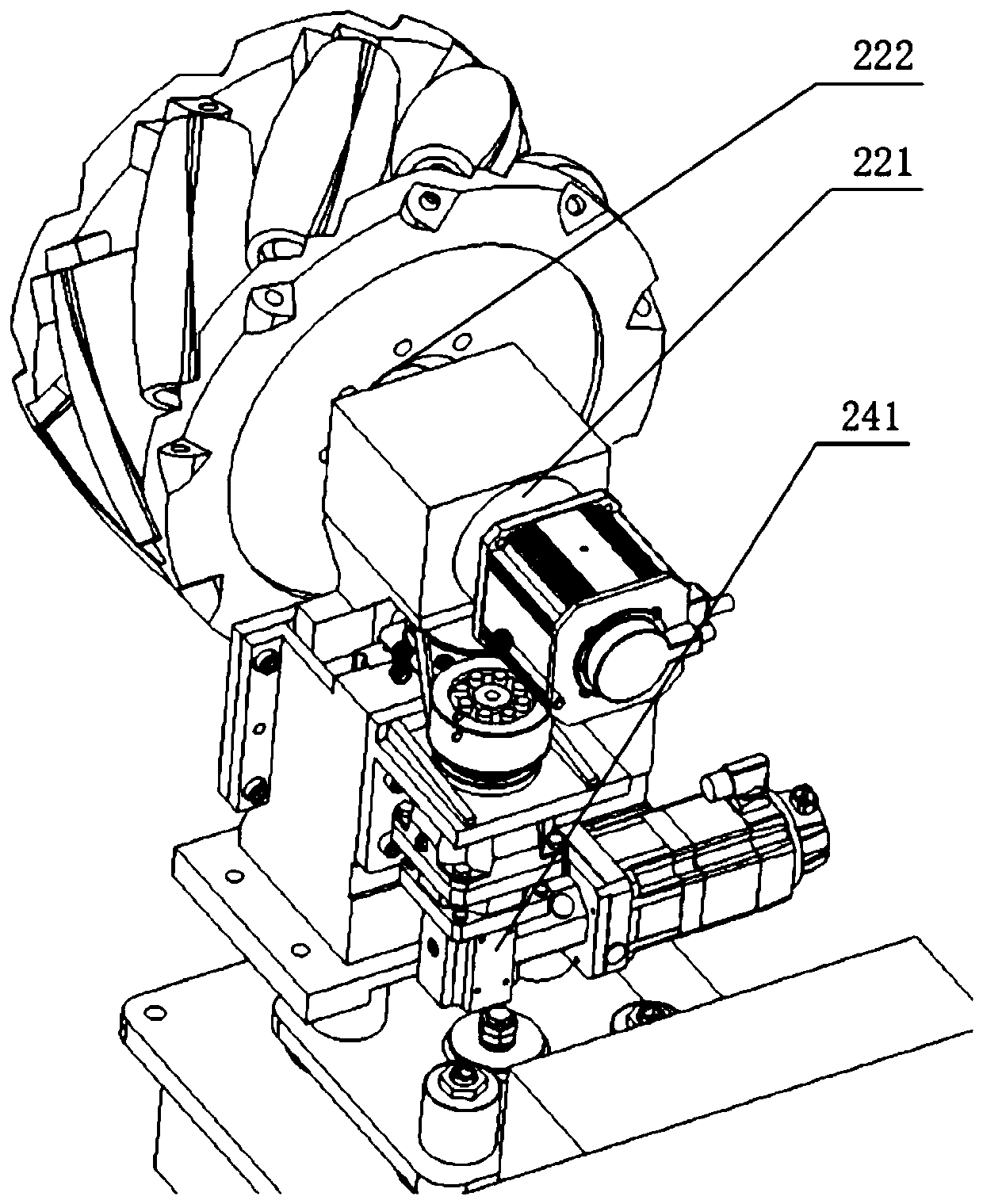
[0027] The power system 2 is arranged on the side of the wheel 1, including a servo m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More