

An orb-slam hardware accelerator
A hardware accelerator and hardware acceleration technology, which is applied in the direction of instruments, processor architecture/configuration, image enhancement, etc., can solve the problems of ORB-SLAM difficult to run in real time with low power consumption, and achieve the effect of reducing power consumption and increasing frame rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Aiming at the problem that the existing ORB-SLAM is difficult to run in real time on a low-power platform, the present invention proposes an ORB-SLAM hardware accelerator. The acceleration module accelerates the process with the largest amount of calculation in the ORB-SLAM process through a dedicated hardware acceleration module, which improves the overall performance and power consumption ratio of the system and makes real-time operation possible with low power consumption. Next, the present invention will be further described in detail by combining specific embodiments and accompanying drawings.
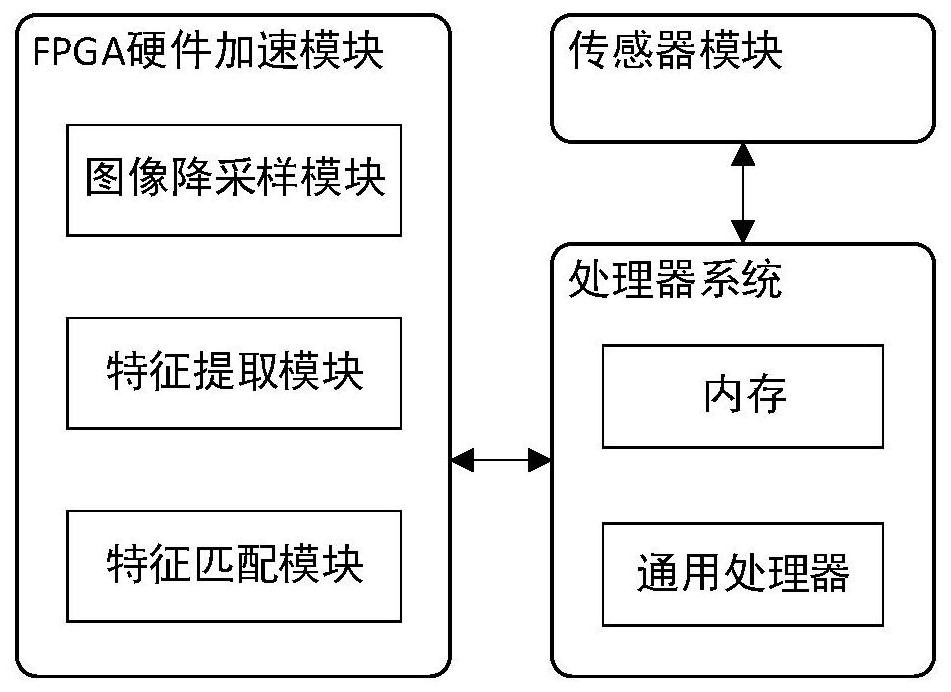
[0035] figure 1 It is a schematic structural diagram of an ORB-SLAM hardware accelerator according to an embodiment of the present invention. Such as figure 1 As shown, the accelerator consists of three parts: FPGA hardware acceleration module, processor system and sensor module. The processor system is the host, the sensor module is connected to the processor system thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More